Chapter 7: Operation
WARNING: PERSONALINJURYRISK
To prevent the risk of a person approaching too close to a moving AMR, follow
the operational guidelines in this section.
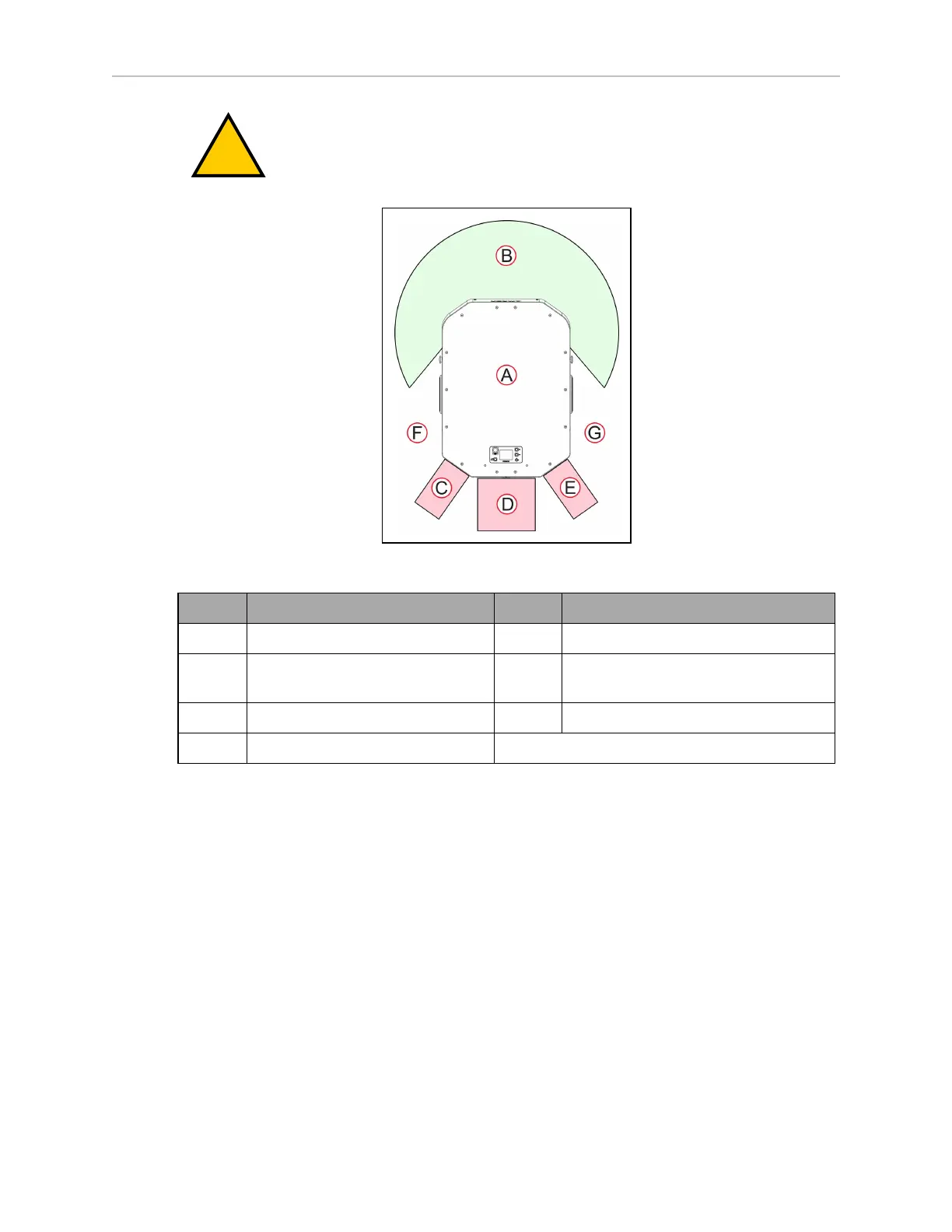
Figure 7-10 Sensor Fields of View (Approximate)
Callout Description Callout Description
A LD-250 top view E Right rear sensor
B Safety and navigation laser 240-
degree field of view.
F Left potential blind spot
C Left rear sensor G Right potential blind spot
D Center rear sensor
It is unlikely that an AMR can drive into a person because of these sensor blind spots, and
when path planning, the AMR never drives autonomously in a reverse direction. However,
under certain circumstances, the AMR can be commanded to move in a reverse direction and
it is possible that a person or object might move into the sensor blind spot without being detec-
ted by the AMR.
The AMR is operating at a low speed (225 mm/sec) during such maneuver, but an AMR with
its payload has considerable mass, and might tip a person over. If your AMRs operate in the
same workspace as people, provide information and training for people so that they:
l
Have complete allowance of the potential directions of movement that an AMR might
take, such as rotating in place and reversing.
l
Know not to stand in or move toward the immediate vicinity of a working AMR.
l
Understand the significance of the warning buzzer.
l
Do not leave or place obstacles where the AMR might not detect the obstacle.
20472-000 Rev B LD-250 Platform User's Guide 135