Function diagrams 05.05
8-92 SIEMENS AG 6RX1700-0AD76
SIMOREG DC Master Operating Instructions
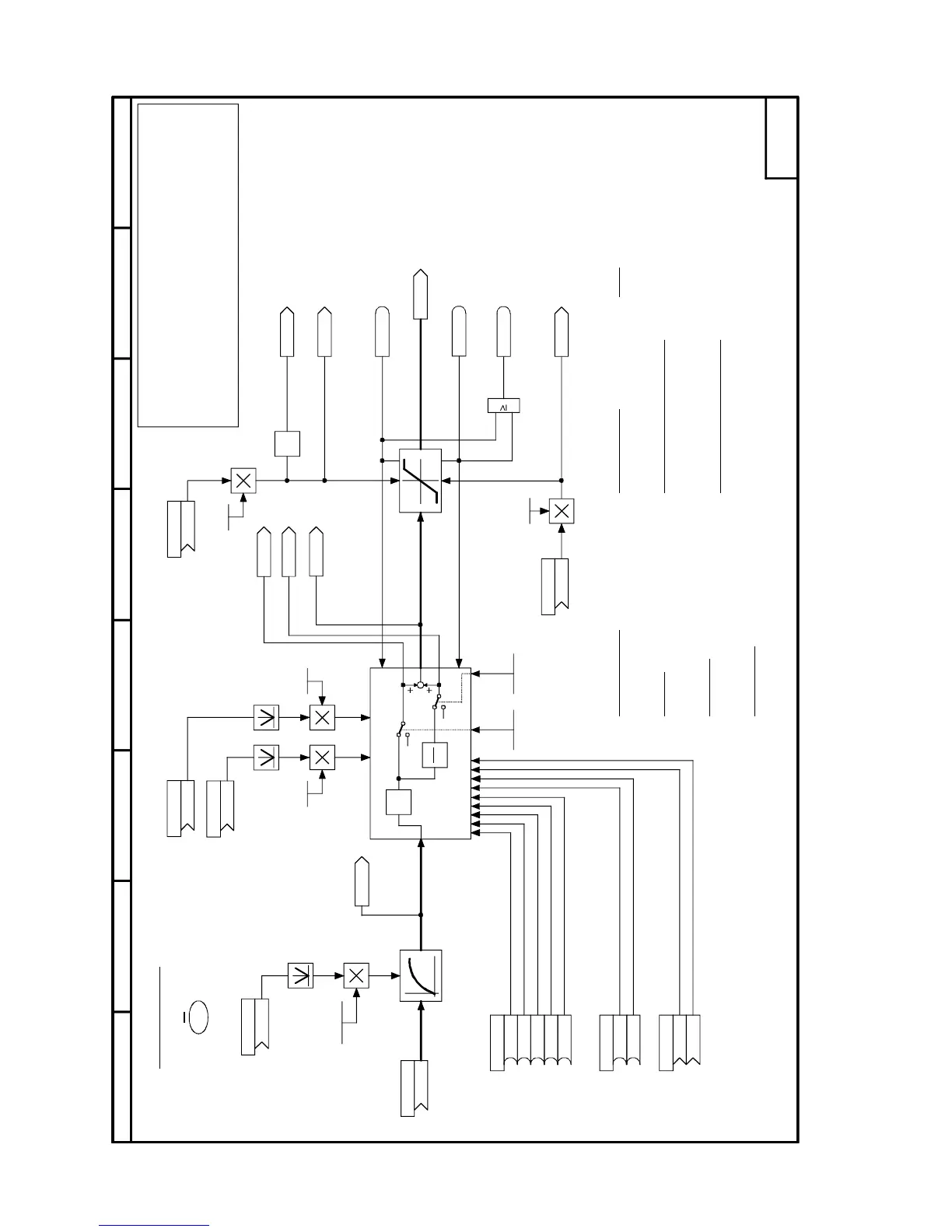
Sheet B183 PI controller 4
87564321
Kp Tn
-1
*
Kp
1
sTn
0
0
1
0
0
1
1
X
Y
U530 (0)
K
U533 (0)
K
U542 (1)
K
U536 (1)
K
K
U531 (0)
B
U532 (0)
B
U538 (1)
K
U534 (1)
K
T1
B
B
K
B
B
B
263
K9330
U535.04 (0 ms)
.04
.04
4
.04
.04
.14
.14
.04
.14
.24
.34
.44
U539.04
(3,000 s)
U537.04
(3,00)
U540.04 (1) U541.04 (1)
.04
.04
K9331
K9332
U543.04
(100,0)
K9336
K9335
K9333
.04
B9663
(K9335)
U545.04
(100,0)
U544 (9336)
K9334
K9337
B9653
.04
B9673
(K9337)
- B183 -
PI-controller
PI-controller
Transfer function:
1 1 + sTn
G(s) = --------- * Kp * ---------
1 + sT1 sTn
P component
I component
0 = Reset P
component
0 = Reset I
component
Positive limit
Negative limit
Controller at
output limit
Enable PI-controller
Filter time
Set PI-controller
1 = set I component <4>
setting value for I component
1 = set output <2>
0 = disable PI-controller <1>
1 = freeze I component <5>
setting value for PI-controller output
<1>
disable PI-controller:
P component = 0
I component = 0
output = 0
<2>
set output:
P component active
I component = setting value - P component
output = setting value
<3>
freeze output:
P component active
I component = frozen output - P component
output is frozen
<4>
set I component:
P component active
I component = setting value
output = P component + I component
1 = freeze output <3>
Priority:
1. disable PI-controller
2. set output
3. freeze output
4. set I component
5. freeze I component
6. freeze I component in pos. direction
7. freeze I component in neg. direction
1 = freeze I comp. in pos. direction <6>
1 = freeze I comp. in neg. direction <7>
PI-controller output
Stop I component in
pos.direction and limit
it to positive limit
Controller at pos.
output limit
Controller at neg.
output limit
<5>
freeze I component:
P component active
I component is frozen
output = P component + I component
<6>
freeze I component in pos. direction:
P component active
if controller input (X) is positive,
I component is frozen
output = P component + I component
<7>
freeze I component in neg. direction:
P component active
if controller input (X) is negative,
I component is frozen
output = P component + I component
Stop I component in
neg.direction and limit
it to negative limit

 Loading...
Loading...