4.1.7 Local / Remote switch-over of the Control Station
The control station can be switched over either by operating the OS (REMON_OP), or by linkable
input REM_L. If REM_SEL=TRUE, input REM_L is active, otherwise control input REMON_OP is
active. The required operator enabling signal QLOCOP is set by REM_SEL and enable
signal LOCOP_EN.
The active control station is output through QREMOTE (1=REMOTE, 0=LOCAL).
4.1.8 Interlocking
Control Function DIR, SOFT, STAR, REV, POL, DAHL
• When LOCK is set, the motor is switched o directly or cannot be switched on.
• LOCK_ON switches the motor on or prevents it from being switched o.
• LOCK_OPT is used to dene the option selected for LOCK_ON = 1 (forward / reverse; fast /
slow).
Note
LOCK_OPT is not active for control functions DIR, SOFT, and STAR.
LOCK has higher priority than settings made with LOCK_ON.
Control Function VALVE, POS
• With LOCK set, the solenoid valve or positioner runs in the position dened by safety
position SS_POS.
• VL_OPEN causes selection of OPEN position and VL_CLOSE causes selection of CLOSED
position.
• VL_HOLD is only active in the POS control function and causes the positioner to stop at its
current position.
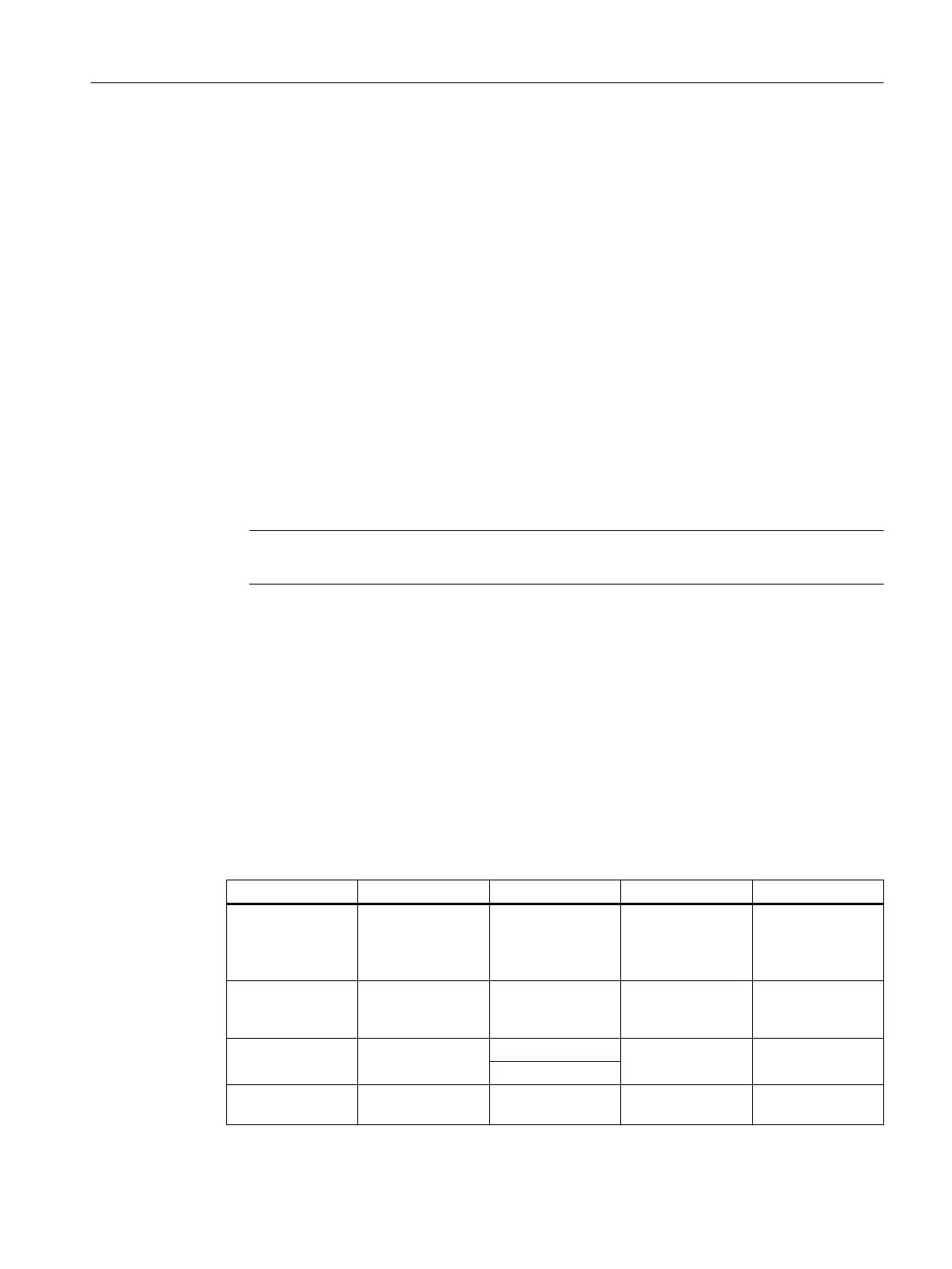
Table 4-2 Control Function VALVE, POS
Block I/O DIR/SOFT/STAR REV/POL/DAHL VALVE POS
LOCK Motor switches
OFF
Motor switches
OFF
Solenoid valve
runs in position de‐
ned by SS_POS
(OPEN or CLOSED)
Positioner runs in
position dened by
SS_POS (OPEN or
CLOSED)
LOCK_ON Motor switches ON Motor performs
the option dened
by LOCK_OPT
not active not active
LOCK_OPT not active 0=FORW./ FAST not active not active
1=REV./ SLOW
VL_OPEN not active not active Solenoid valve
OPEN
Positioner runs in
OPEN
SIMO_CHN Function
4.1Description
SIMOCODE DP PCS 7 Library Migration (Legacy) - V9.1 SP2
Programming and Operating Manual, 11/2022, A5E51265657002A/RS-AC/003 41