Instruction Manual for AS380 Series Elevator Integrated Drive Controller
Chapter 7 Parameter Table of Integrated Drive Controller
F215——low speed PID adjustor incremental P1
F216——low speed PID adjustor integral I1
F217——low speed PID adjustor differential D1
F218——medium speed PID adjustor incremental P2
F219——medium speed PID adjustor integral I2
F220——medium speed PID adjustor differential D2
F221——high speed PID adjustor incremental P3
F222——high speed PID adjustor integral I3
F223——high speed PID adjustor differential D3
F224——low speed point switch frequency F0.Setting the phased low speed point switch
frequency value of the PID adjustor, it is set in accordance with percentage of rated
frequency. If the rated frequency is 50Hz, the required switch frequency F0 is 10Hz.
Since 10 Hz is 20% of 50Hz, the value should be set as 20.
F225——high speed point switch frequency F1. Setting the phased high speed point switch
frequency value of the PID adjustor, it is set in accordance with percentage of rated
frequency. If the rated frequency is 50Hz, the required switch frequency F1 is 40Hz.
Since 40Hz is 80% of 50Hz, the value should be set as 80.
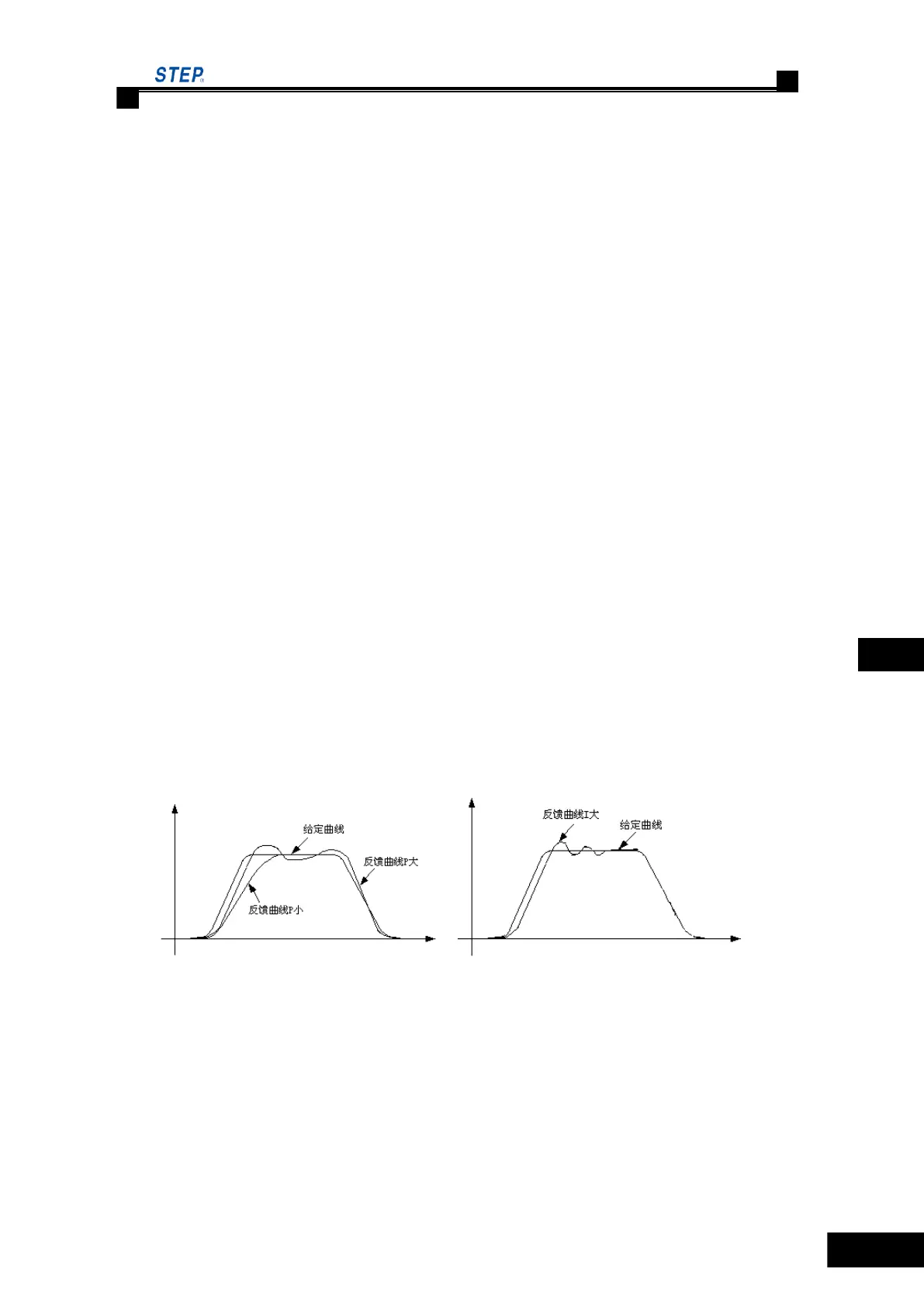
F212~F225 : The role of proportional constant P of PID adjustor: the increase in P value will
improve the system response speed. But too big the P value will cause the overstrike
and oscillation. The effect of P value upon the feedback is as the following Fig 7.1.
The integral constant I value affect the response time. The bigger value I is, the faster
speed is.
Once users find the system overstrike is too big or dynamic response too slow,
properly increase the value I. But once the value I is too big, system oscillation may
occur. The effect of value I upon the feedback is as the following Fig 7.2. Differential
constant D affects the sensitiveness of system response. The increase in D value
makes the system response quick.
But once the value D is too big, system oscillation may occur.
Fig 7.1 effect of proportional Fig 7.2 effect of integral constant I
Constant upon feedback upon feedback
During the PID constant adjustment, usually the proportional constant P should be adjusted firstly.
Increase the value P as big as possible under the precondition of guaranteeing system stability.
Then adjust the integral constant I to make the system both response quickly and overstrike not
much. The differential constant D can be adjusted properly under the precondition of adjustment
of P and I still not enough for the improvement of system sensitiveness.
The effect scope of PID adjustor of various speed is shown as following fig 7.3
F226—— zero servo action time adjustment parameter. The zero servos is that the
 Loading...
Loading...