Shanghai STEP Electric Corporation
Chapter 7 Parameter Table of Integrated Drive Controller
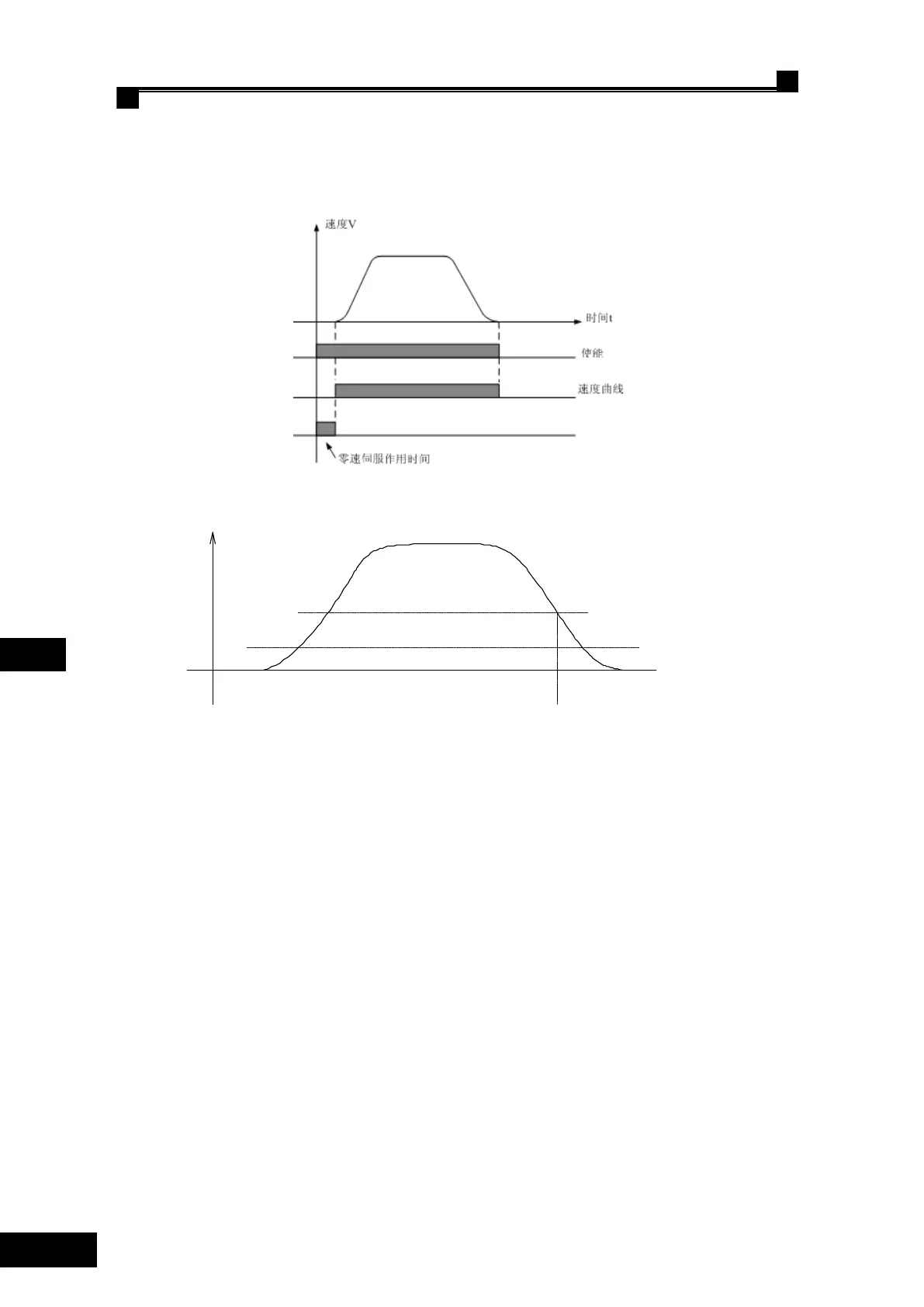
Frequency converter output a phase of zero speed torque holding during the
Period from the end of excitation to given speed. The parameter determine
Action time of three zero servos PID parameter of F212、F213 and F214
The action time of zero servos is as following figure 7.4
Fig 7.4 the action time of zero servos
F227—— band-type brake action time, it is the adjustable parameter for band-type brake
mechanic release time. The parameter is set in accordance with the actual band-type
brake mechanic release time.
F228—— time parameter of current slowdown . The parameter F228 set the current slowdown
time period from frequency converter receiving stop-output command to actual zero
output current. The default value is 0. Only under the some special circumstance, the
rapid current release of frequency converter will cause big noise to motor as the
elevator stop. Therefore, appropriately increase the value should be necessary. But the
value should increase no bigger than the delay time of main contactor release.
Otherwise, the contactor live release will cause contacts pull arc and affect the service
life of contactor as the result. The frequency converter will not output any current
since the loop disconnect after contactor release.
F229——compensation torque direction adjustment parameter. The parameter work when there is
startup pre-load compensation function. The default value is 0. But if the system
torque compensation direction is wrong as the result of other reasons, simply set the
F229 value from 0 to 1 to solve the problem.
 Loading...
Loading...