Shanghai STEP Electric Corporation
Chapter 8 Elevator Elevator Commissioning Guide
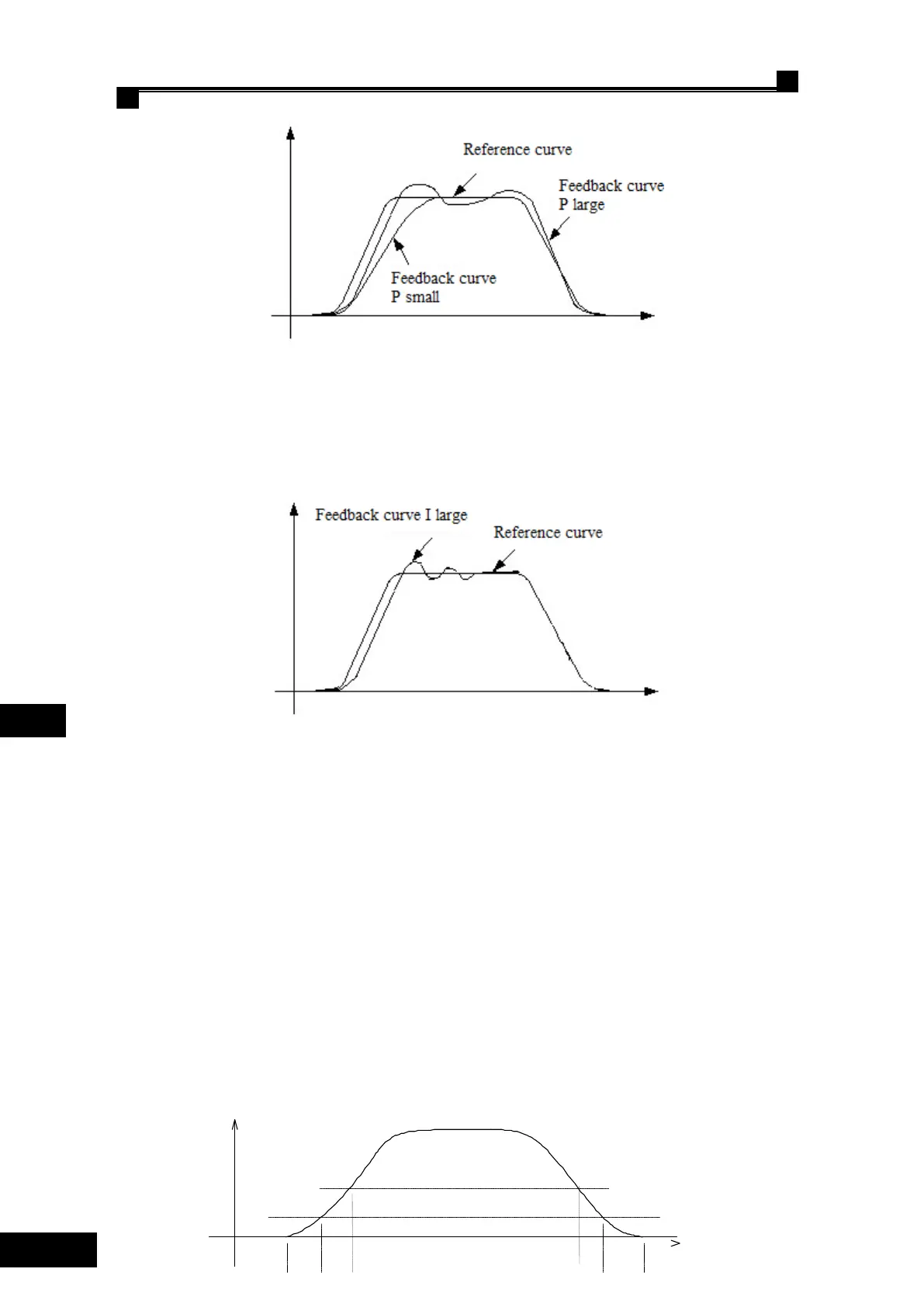
Impact of P (Propotional Constant) on the Feedback Tracking
Increase of the integral constant I can enhance the system's dynamic response. Increase I if
the overshoot is too large or the dynamic response is too long. But if I is too large, it may generate
overshoot and oscillation of the system. The impact of P on the feedback tracking is as shown
below.
Impact of I (Integral Constant) on the Feedback Tracking
Similarly, increasing the differential constant D can increase the sensitivity of the system.
However, if D is too large, the system will be too sensitive and cause oscillation.
In the adjustment of PID regulator parameters, it is usually to adjust the proportional
constant P first. Under the premise of system not oscillated, maximize the P value, and then
adjust the integral constant I, so that the system has both fast response and little overshoot. Only
when the adjustment results of P and I are not satisfactory, adjust the D value.
The segment of the PID regulator in Elevator operation curve is as shown in Diagram 8.3
below.
 Loading...
Loading...