AC Induction Motor Example
8 - 32 C2000 Microcontroller Workshop - Numerical Concepts
With the ability to select the GLOBAL_Q value for all calculations in the "IQmath", an experi-
ment was conducted to see what maximum and minimum Q value the system could tolerate be-
fore it became unstable. The results are tabulated in the slide below:
AC Induction Motor Example
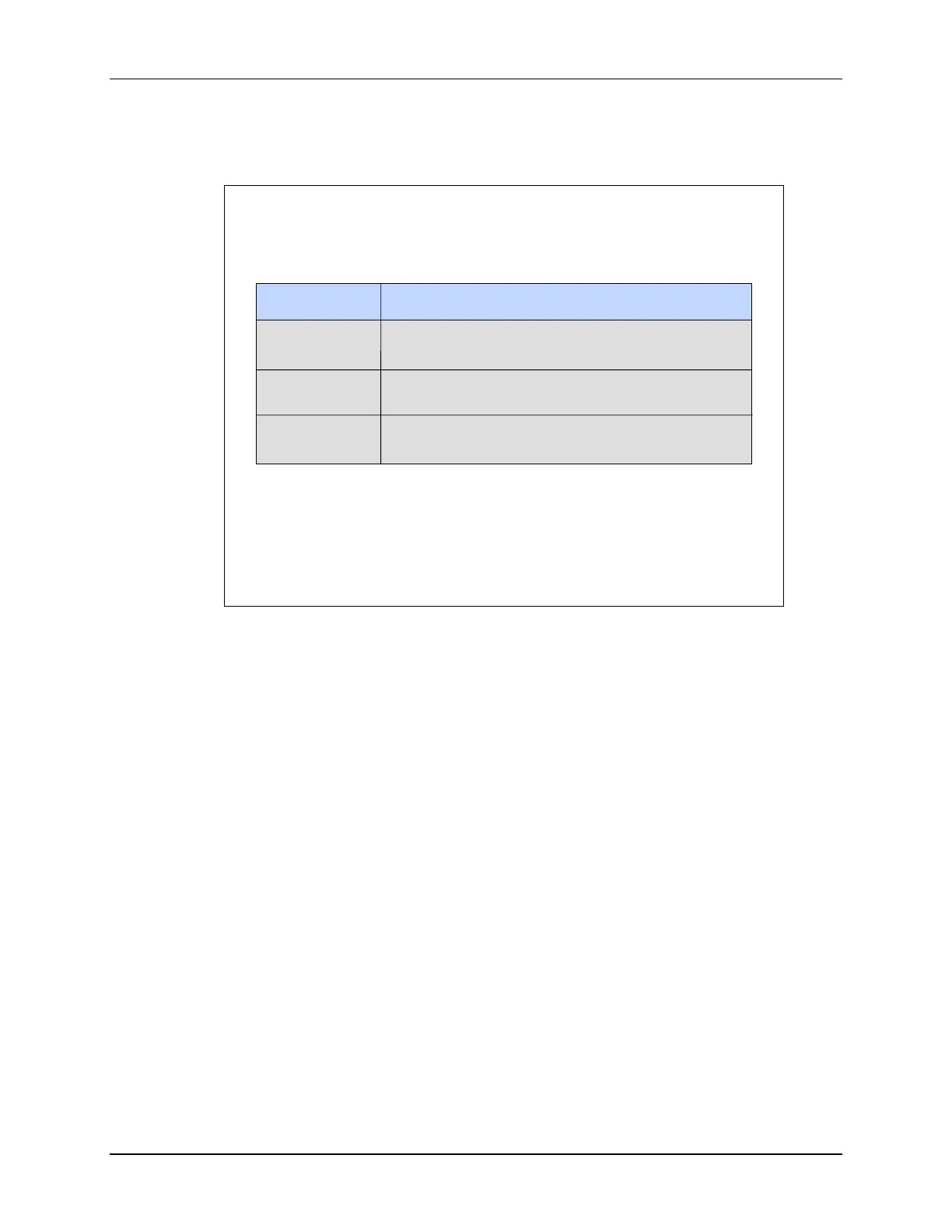
Q stability range
The developer must pick the right GLOBAL_Q value!
Unstable
(not enough resolution, quantization problems)
Q18 to Q0
Stable
Q26 to Q19
Unstable
(not enough dynamic range)
Q31 to Q27
Stability RangeQ range
The above indicates that, the AC induction motor system that we simulated requires a minimum
of 7 bits of dynamic range (+/-64) and requires a minimum of 19 bits of numerical resolution (+/-
0.000002). This confirms our initial analysis that the largest coefficient value being 33.33333
required a minimum dynamic range of 7 bits. As a general guideline, users using IQmath should
examine the largest coefficient used in the equations and this would be a good starting point for
setting the initial GLOBAL_Q value. Then, through simulation or experimentation, the user can
reduce the GLOBAL_Q until the system resolution starts to cause instability or performance deg-
radation. The user then has a maximum and minimum limit and a safe approach is to pick a mid-
point.
What the above analysis also confirms is that this particular problem does require some calcula-
tions to be performed using greater then 16 bit precision. The above example requires a mini-
mum of 7 + 19 = 26 bits of numerical accuracy for some parts of the calculations. Hence, if one
was implementing the AC induction motor control algorithm using a 16 bit fixed-point DSP, it
would require the implementation of higher precision math for certain portions. This would take
more cycles and programming effort.
The great benefit of using GLOBAL_Q is that the user does not necessarily need to go into de-
tails to assign an individual Q for each variable in a whole system, as is typically done in conven-
tional fixed-point programming. This is time consuming work. By using 32-bit resolution and the
"IQmath" approach, the user can easily evaluate the overall resolution and quickly implement a
typical digital motor control application without quantization problems.