4.3 Controller I/O
Emergency Stop Safeguard Stop
Robot stops moving Yes Yes
Program execution Stops Pauses
Robot power Off On
Reset Manual Automatic or manual
Frequency of use Infrequent Every cycle to infrequent
Requires re-initialization Brake release only No
Stop category (IEC 60204) 1 2
Performance level of
monitoring function (ISO 13849-1) PLd PLd
It is possible to use the configurable I/O to set up additional safety I/O functionality,
e.g. emergency stop output. Configuring a set of configurable I/O for safety functions
are done through the GUI, see part II.
Some examples of how to use safety I/O are shown in the following subsections.
DANGER:
1. Never connect safety signals to a PLC which is not a safety
PLC with the correct safety level. Failure to follow this warn-
ing could result in serious injury or death as one of safety stop
functions could be overridden. It is important to keep safety in-
terface signals separated from the normal I/O interface signals.
2. All safety-related I/O are constructed redundantly (Two inde-
pendent channels). Keep the two channels separate so that a
single fault cannot lead to loss of the safety function.
3. Safety functions must be verified before putting the robot into
operation. Safety functions must be tested regularly.
4. The robot installation shall conform to these specifications. Fail-
ure to do so could result in serious injury or death as the safety
stop function could be overridden.
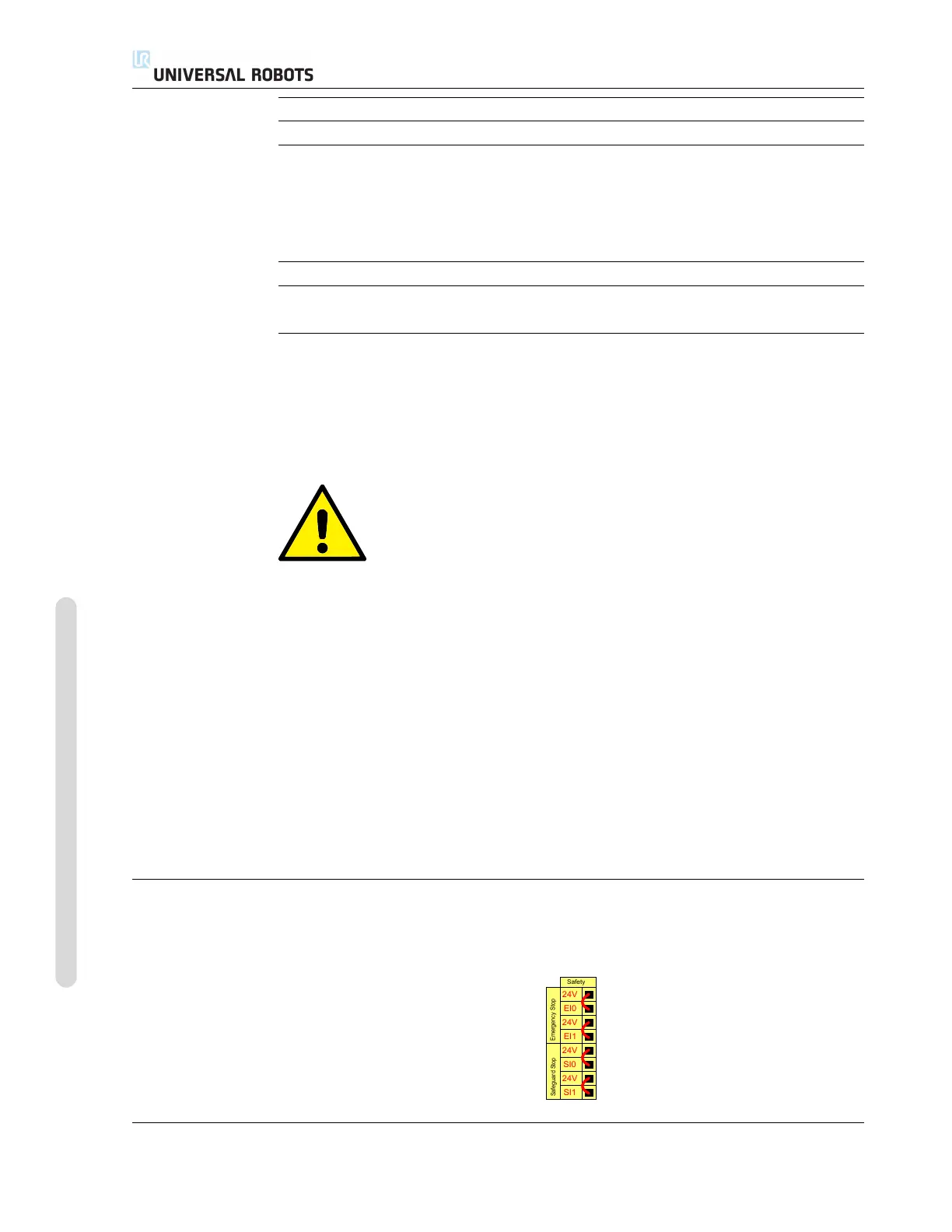
4.3.2.1 Default safety configuration
The robot is shipped with a default configuration which enables operation without
any additional safety equipment, see illustration below.
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
UR5/CB3 I-24 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.