10.13 Safety I/O
10.13 Safety I/O
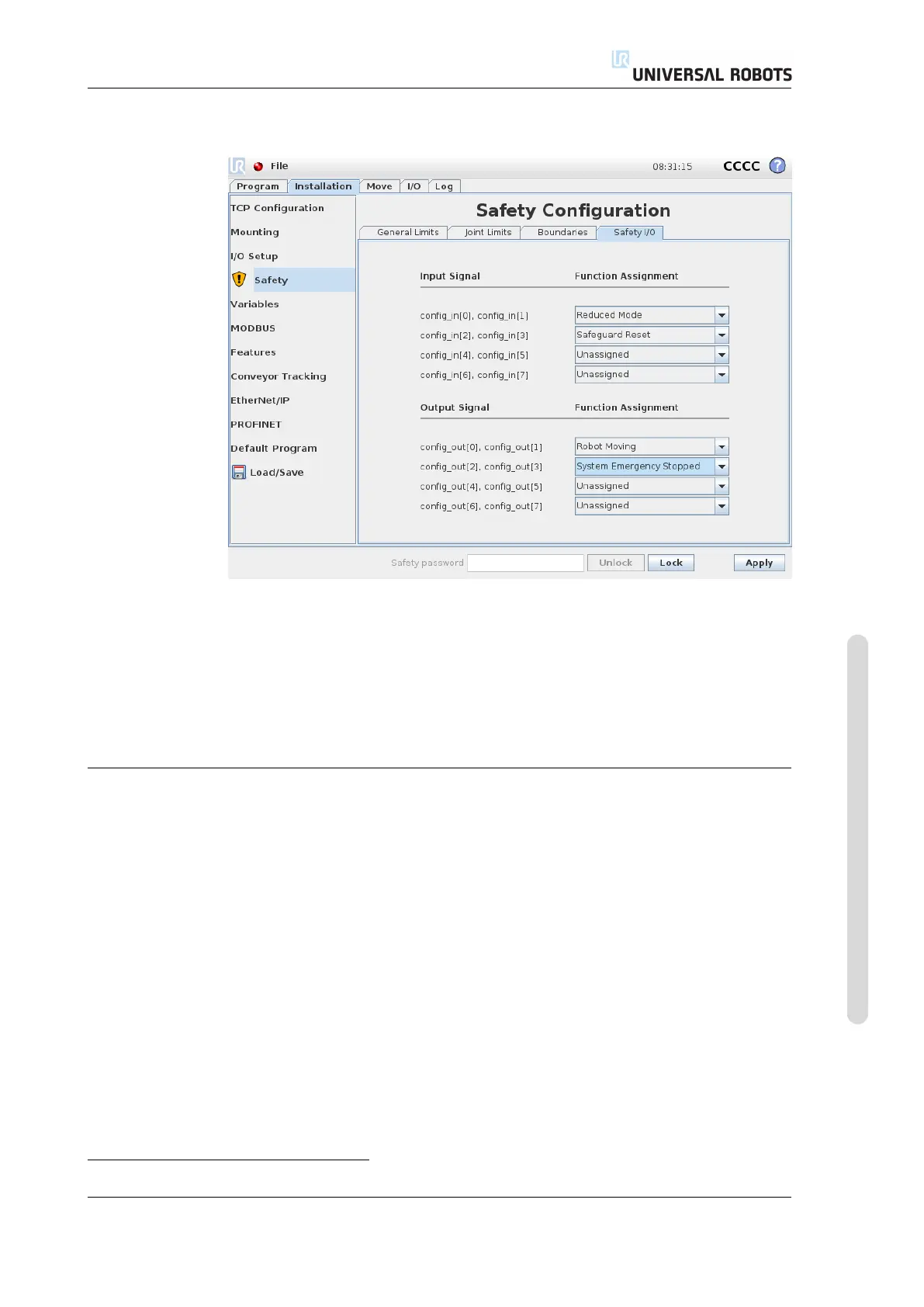
This screen defines the Safety functions for configurable inputs and outputs (I/Os).
The I/Os are divided between the inputs and outputs, and are paired up so that
each function is providing a Category
2
3 and PLd I/O.
Each Safety function can only control one pair of I/Os. Trying to select the same
safety function a second time removes it from the first pair of I/Os previously de-
fined. There are 5 Safety functions for input signals, and 4 for output signals.
10.13.1 Input Signals
For input signals, the following Safety functions can be selected: System Emergency
Stop, Reduced Mode, Safeguard Reset, 3-Position Switch and Operational
Mode.
System Emergency Stop When configured, it allows for having an additional
Emergency Stop button besides the Emergency Stop Button on the Teach
Pendant. This functionality requires the use of an ISO 13850-compliant device.
Reduced Mode All safety limits have two modes in which they can be applied:
Normal mode, which specifies the default safety configuration, and Reduced mode
(see 10.6 for more details). When this input safety function is selected, a low signal
given to the inputs causes the safety system to transition to Reduced mode. If nec-
essary, the robot arm then decelerates to satisfy the Reduced mode limit set. Should
the robot arm still violate any of the Reduced mode limits, it performs a Stop Cat-
egory 0. The transition back to Normal mode happens in the same manner. Note
2
According to ISO 13849-1, see Glossary for more details.
Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
II-19 CB3