13.12 Installation → Features
13.12.5 Example: Manually updating a feature to adjust a program
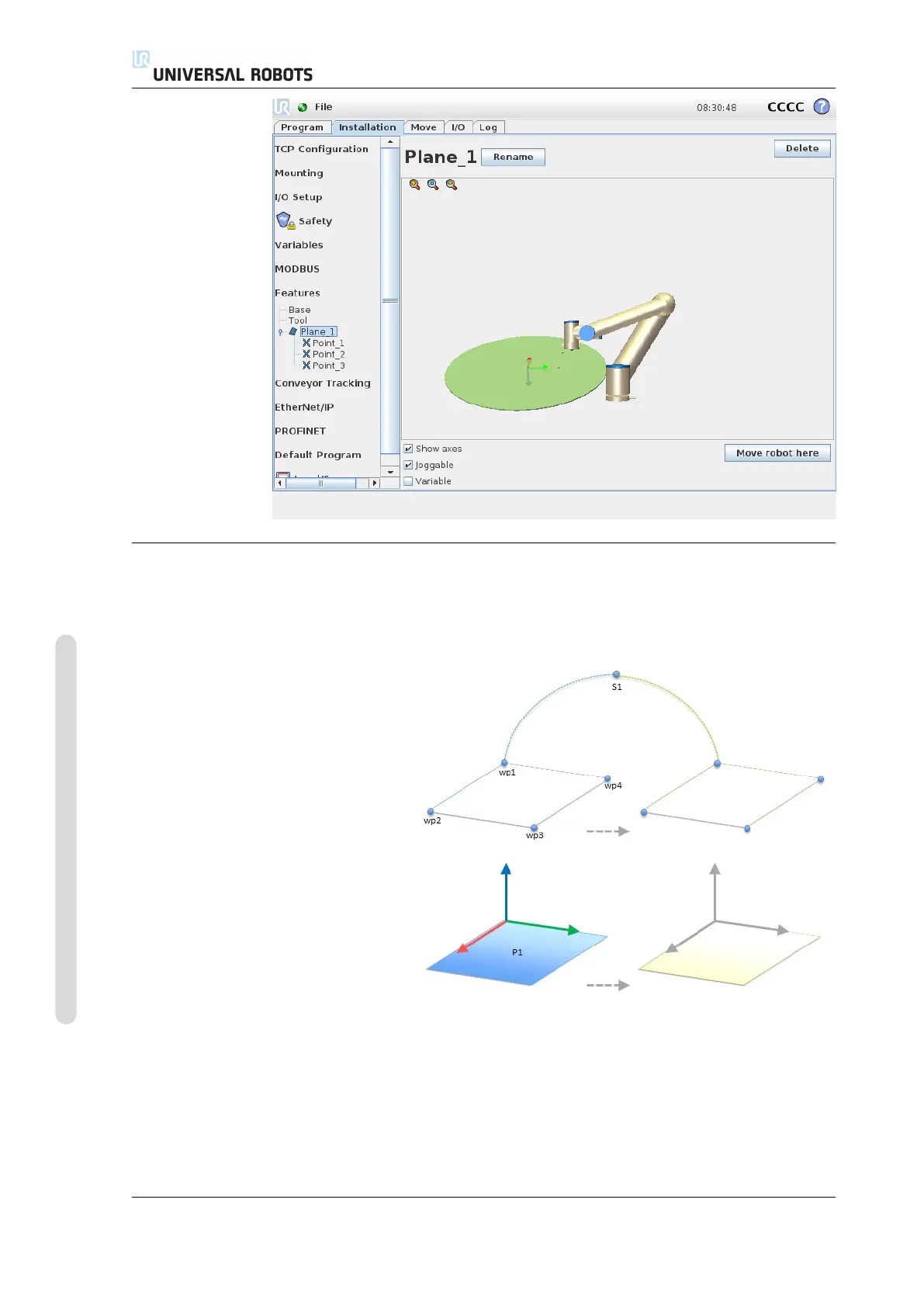
Consider an application where multiple parts of a robot program is relative to a
table. In figure 13.4 this is illustrated as the movement from waypoints wp1 through
wp4.
Robot Program
MoveJ
S1
MoveL # Feature: P1_var
wp1
wp2
wp3
wp4
Figure 13.4: Simple program with four waypoints relative to a feature plane manually updated by
changing the feature
It is a requirement for the application that the program should be reused for multi-
ple robot installations, where only the position of the table might vary slightly. The
movement relative to the table is identical.
By defining the position of the table as a feature P1 in the installation, and making
CB3 II-56 Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.