4 Mechanical Interface
4.1 Introduction
This chapter describes the basics of mounting the various parts of the robot system.
Electrical installation instructions in chapter 5 must be observed.
4.2 Workspace of the Robot
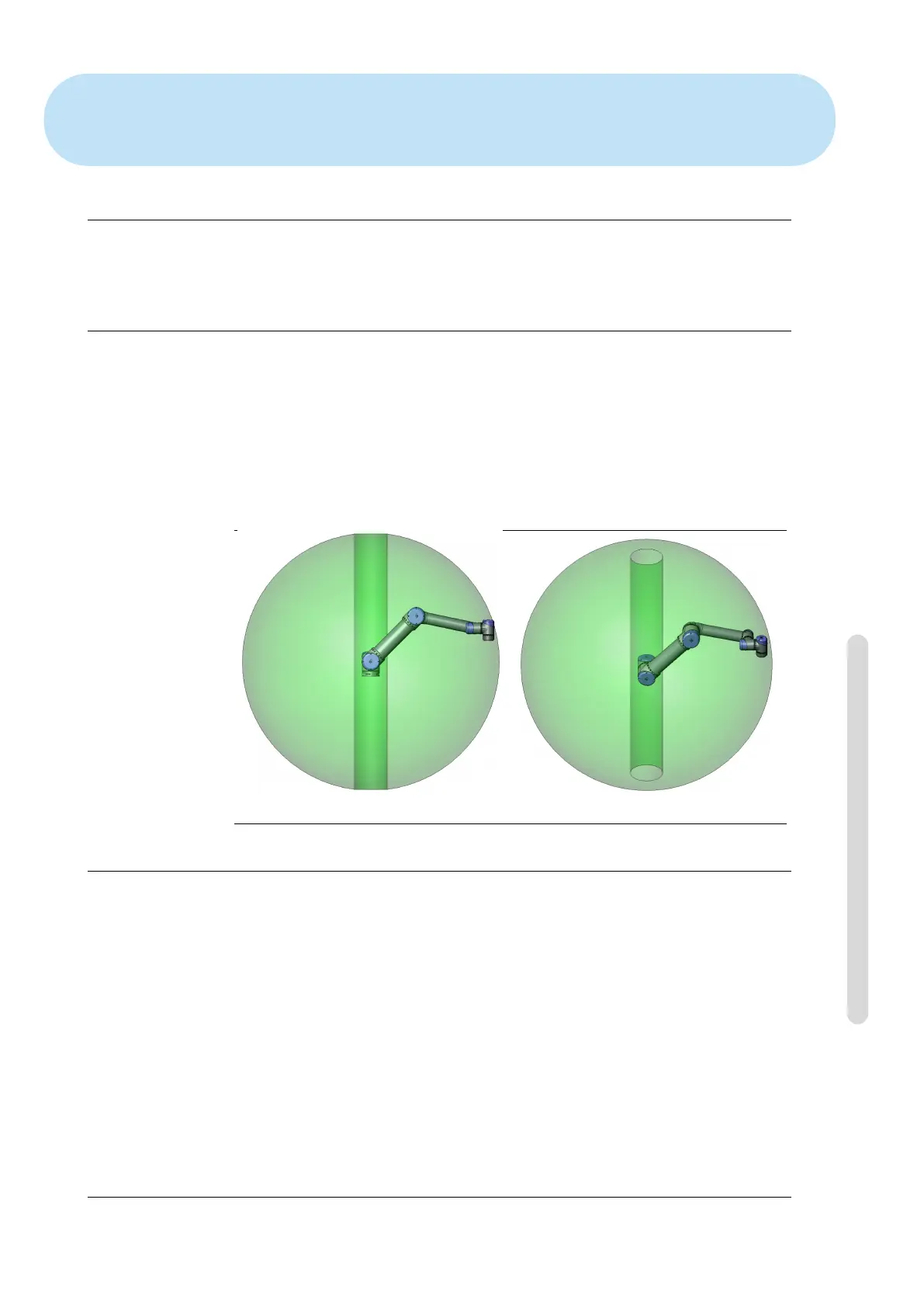
The workspace of the UR5 robot extends 850 mm from the base joint. It is important
to consider the cylindrical volume directly above and directly below the robot base
when a mounting place for the robot is chosen. Moving the tool close to the cylin-
drical volume should be avoided if possible, because it causes the joints to move
fast even though the tool is moving slowly, causing the robot to work inefficiently
and making it difficult to conduct a risk assessment.
Front Tilted
4.3 Mounting
Robot Arm The robot arm is mounted using four M8 bolts, using the four 8.5 mm
holes on the base. It is recommended to tighten these bolts with 20 N m torque. If
very accurate repositioning of the robot arm is desired, two Ø8 holes are provided
for use with a pin. Also, an accurate base counterpart can be purchased as an
accessory. Figure 4.1 shows where to drill holes and mount the screws.
Mount the robot on a sturdy surface strong enough to withstand at least ten times
the full torque of the base joint and at least five times the weight of the robot arm.
Furthermore the surface shall be vibration free.
If the robot is mounted on a linear axis or a moving platform then the acceleration
of the moving mounting base shall be very low. A high acceleration might cause
the robot to stop, thinking it bumped into something.
Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
I-21 UR5/CB3