18.2 I/O overview and troubleshooting
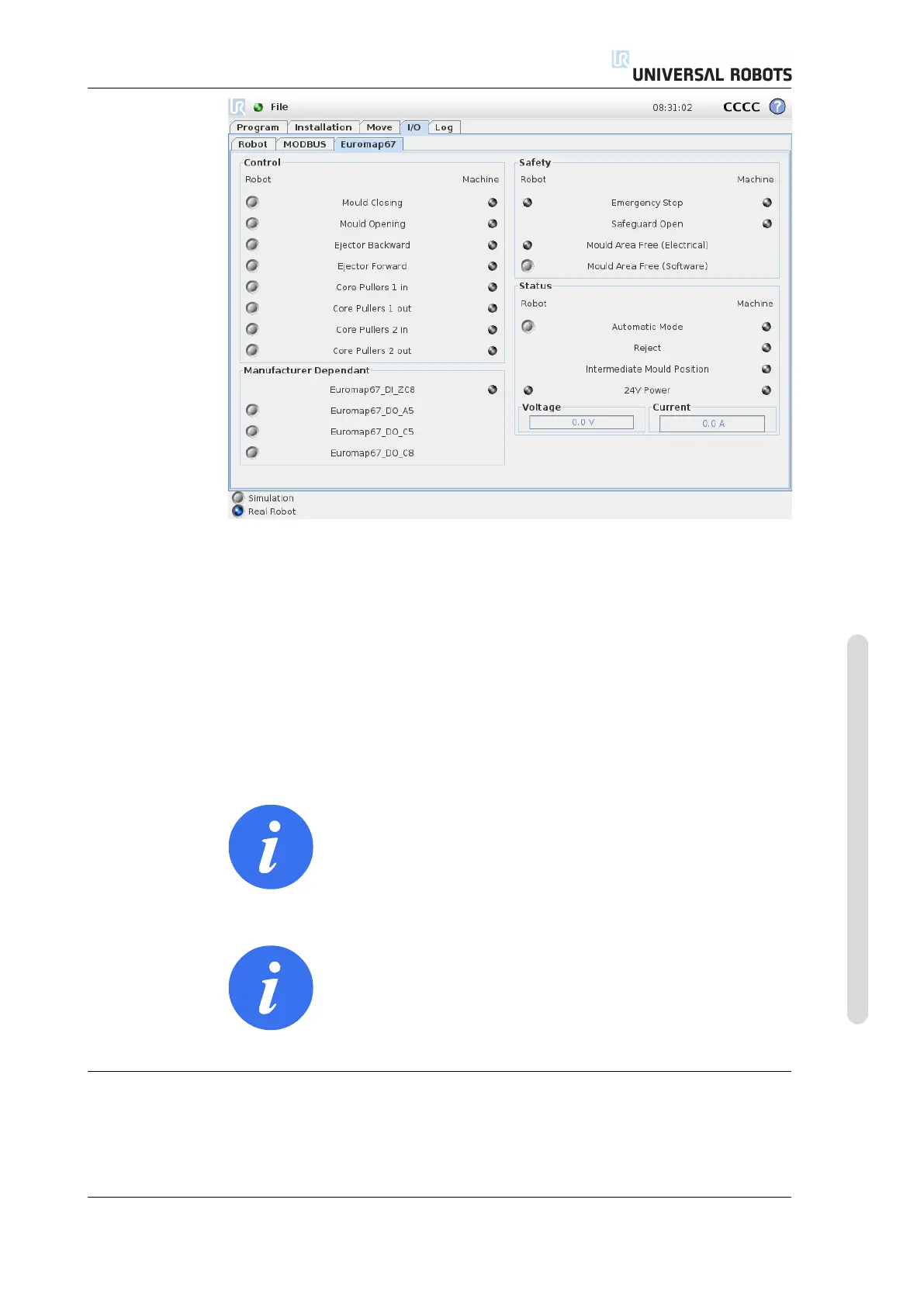
There are four frames on this screen, which are described separately below. Com-
mon for all are the two columns Robot and Machine, which respectively shows but-
tons for controlling output signals, and indicators for showing state of input sig-
nals.
The (normal) state of the signals at startup, is that they are all low, except for the
24V signals, and the robot output Automatic Mode which is active-low and therefore
set high per default.
If a signal is not part of a program structure, and it is intended to be used in a robot
program, this is achievable making use of e.g. Action and Wait nodes.
NOTE:
“Automatic mode” from the robot to the IMM is active low. The
button reflects the physical level and therefore “Automatic mode”
is activated when the button is not activated.
NOTE:
The buttons for controlling output signals are per default only
availabe in robot programming mode. This can, however, be set
as desired on the I/O setup tab found on the Installation screen.
18.2.1 Control
The signals related to controlling the interaction between the robot and the IMM
are shown here. These signals are all used by the program structures, where they
have been joined in appropriate and secure ways.
Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
III-13 CB3