13.6 Installation → TCP Configuration
a program, the default TCP is set as the active one. Within a program, any of the
specified TCPs can be set as the active one for a particular movement of the robot
(see 14.5 and 14.10).
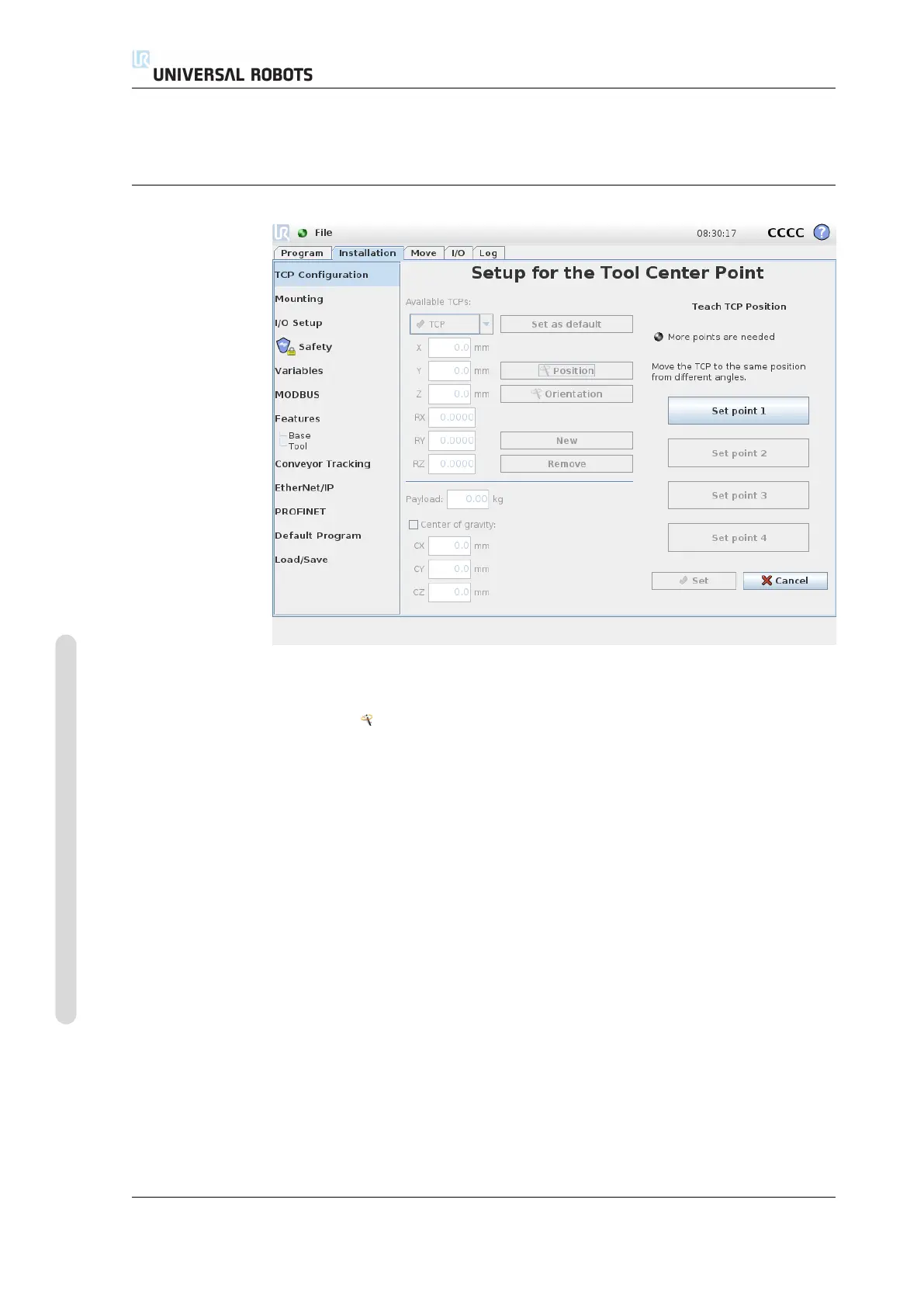
13.6.3 Teaching TCP position
TCP position coordinates can be calculated automatically as follows:
1. Tap the Position button.
2. Choose a fixed point in the workspace of the robot.
3. Use the buttons on the right side of the screen to move the TCP to the cho-
sen point from at least three different angles and to save the corresponding
positions of the tool output flange.
4. Verify the calculated TCP coordinates and set them onto the selected TCP us-
ing the Set button.
Note that the positions must be sufficiently diverse for the calculation to work cor-
rectly. If they are not, the status LED above the buttons turns red.
Furthermore, even though three positions are usually sufficient to determine the
correct TCP, the fourth position can be used to further verify that the calculation
is correct. The quality of each saved point with respect to the calculated TCP is
indicated using a green, yellow or red LED on the respective button.
CB3 II-42 Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.