14.6 Command: Fixed Waypoint
14.6 Command: Fixed Waypoint
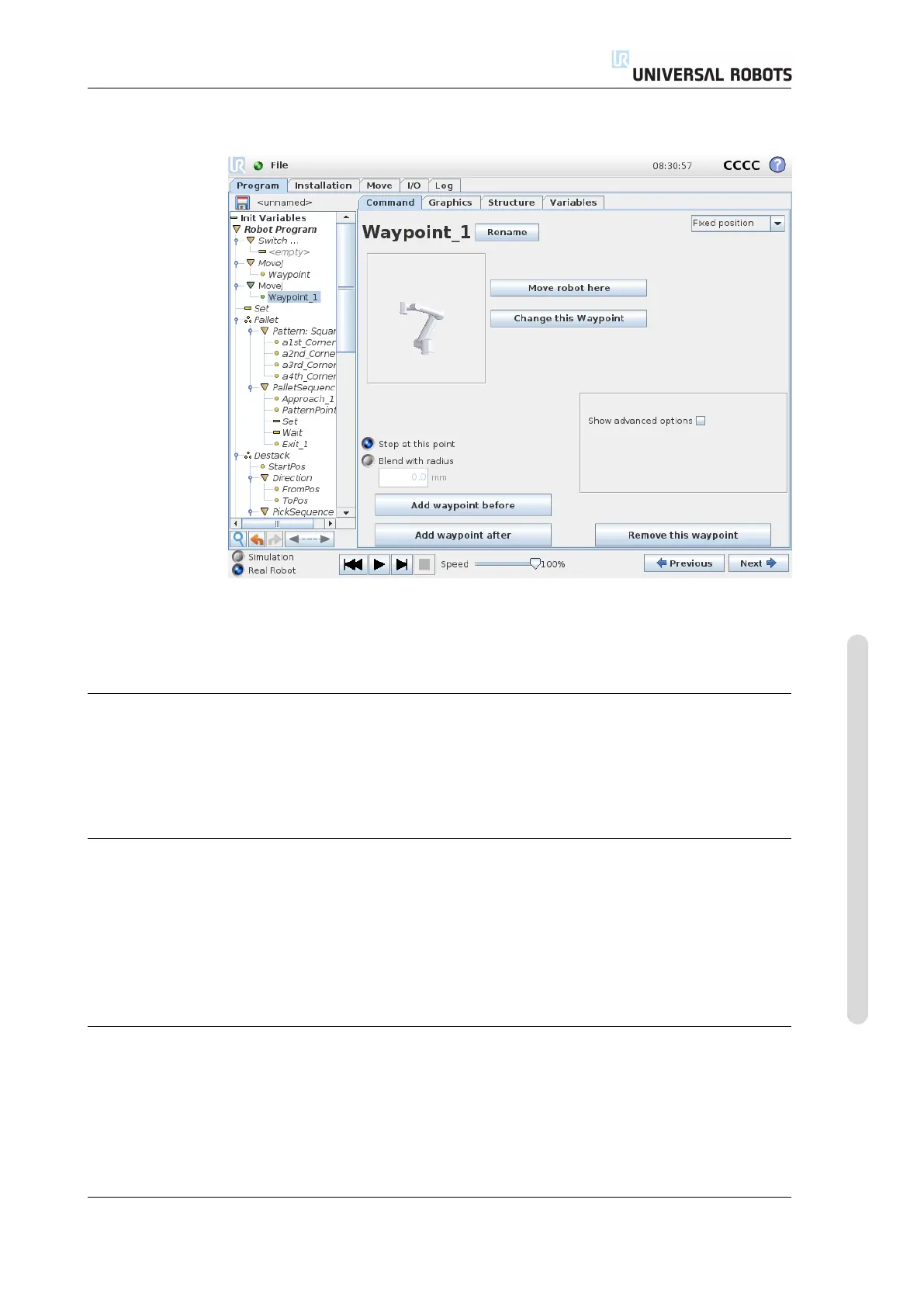
A point on the robot path. Waypoints are the most central part of a robot program,
telling the robot arm where to be. A fixed position waypoint is given by physically
moving the robot arm to the position.
Setting the waypoint
Press this button to enter the Move screen where you can specify the robot arm’s
position for this waypoint. If the waypoint is placed under a Move command in
linear space (moveL or moveP), there needs to be a valid feature selected at that
Move command, in order for this button to be pressable.
Waypoint names
Waypoints automatically get a unique name when they are defined. The name can
be changed by the user. Waypoints with the same name share position information.
Thus, changing the position of a waypoint will affect all other waypoints with the
same name. Other waypoint information such as blend radius, tool/joint speed and
tool/joint acceleration is configured for individual waypoints even though they
have the same name.
Blending
Blending enables the robot to smoothly transition between two trajectories, without
stopping at the waypoint between them.
Example Consider a pick and place application as an example (see figure 14.2),
where the robot is currently at Waypoint 1 (WP_1), and it needs to pick up an object
Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
II-73 CB3