14.24 Command: Force
Force mode is suited for applications where the actual tcp position along a prede-
fined axis is not important, but instead a desired force along that axis is required.
For example if the robot TCP should roll against a curved surface, or when pushing
or pulling a workpiece. Force mode also supports applying certain torques around
predefined axes. Note that if no obstacles are met in an axis where a non-zero force
is set, the robot arm will try to accelerate along/about that axis.
Although an axis has been selected to be compliant, the robot program will still try
to move the robot along/around that axis. However, the force control assures that
the robot arm will still approach the specified force.
WARNING:
1. Avoid high deceleration just before entering force mode.
2. Avoid high acceleration in force mode, since it decreases force
control accuracy.
3. Avoid movements parallel to compliant axes before entering
force mode.
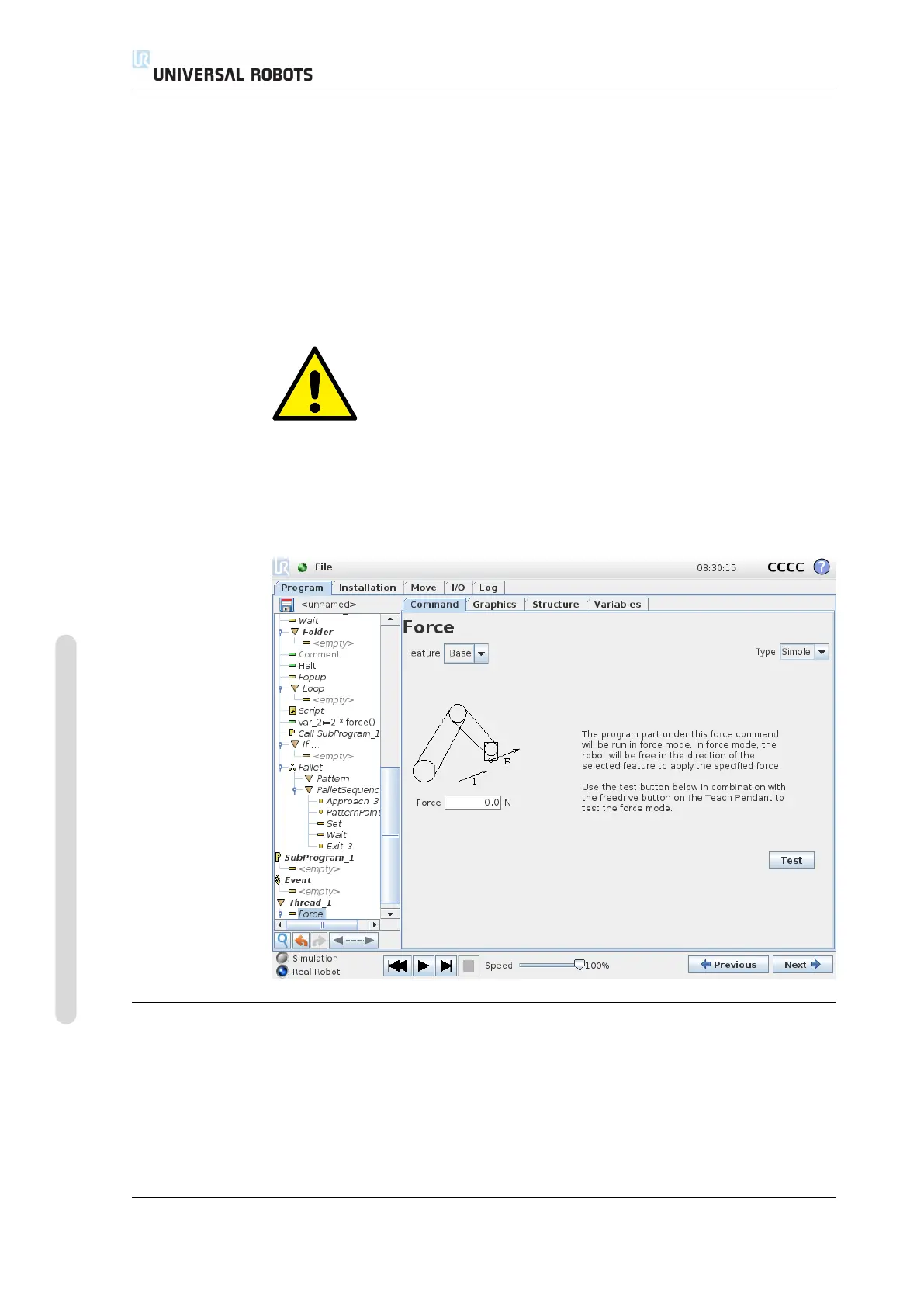
Feature selection
The Feature menu is used to select the coordinate system (axes) the robot will use
while it is operating in force mode. The features in the menu are those which have
been defined in the installation, see 13.12.
CB3 II-92 Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.