5.3 Controller I/O
DANGER:
1. Never connect safety signals to a PLC which is not a safety
PLC with the correct safety level. Failure to follow this warn-
ing could result in serious injury or death as one of safety stop
functions could be overridden. It is important to keep safety
interface signals separated from the normal I/O interface sig-
nals.
2. All safety-related I/O are constructed redundantly (Two in-
dependent channels). Keep the two channels separate so that
a single fault cannot lead to loss of the safety function.
3. Safety functions must be verified before putting the robot into
operation. Safety functions must be tested regularly.
4. The robot installation shall conform to these specifications.
Failure to do so could result in serious injury or death as the
safety stop function could be overridden.
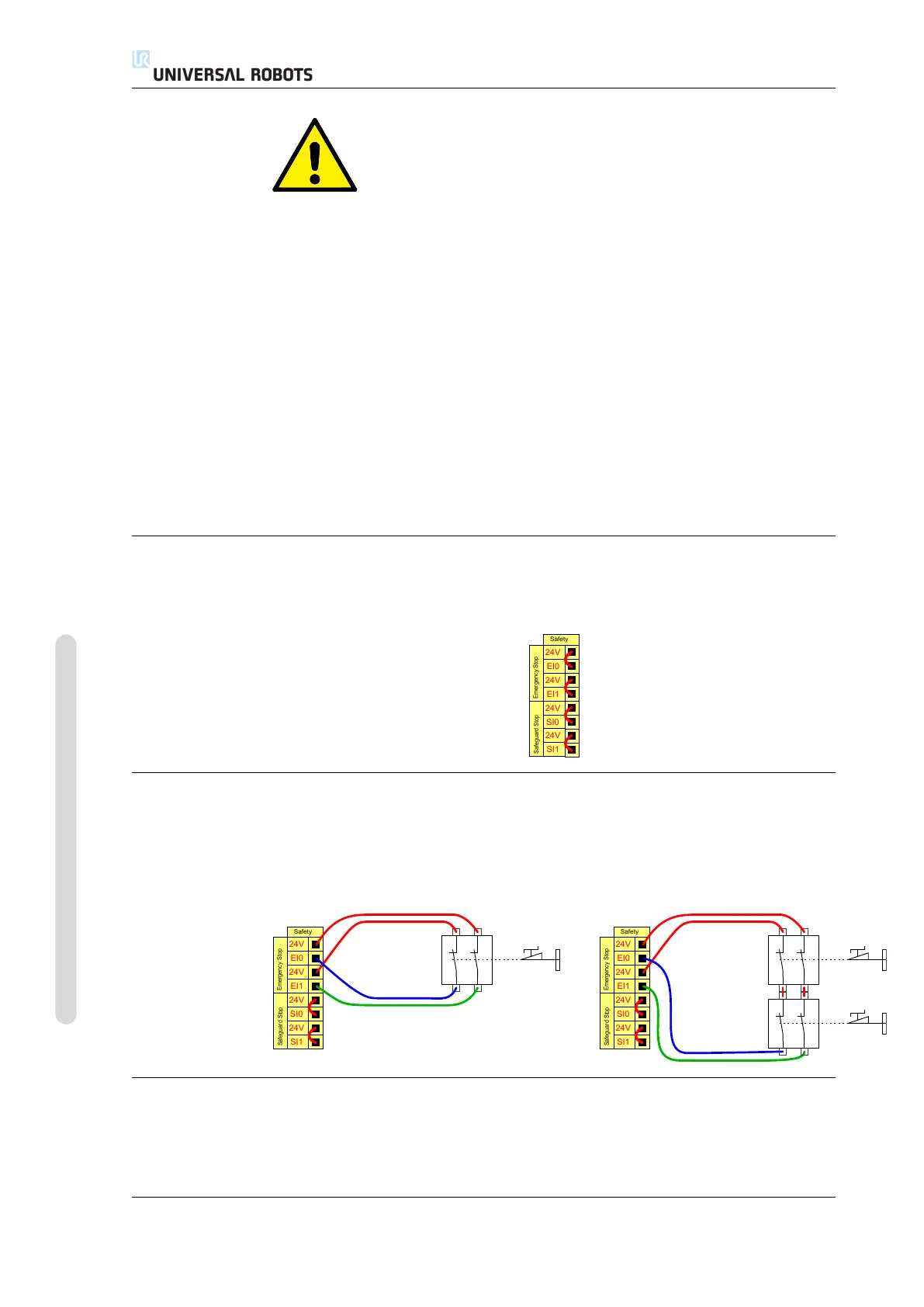
5.3.2.1 Default safety configuration
The robot is shipped with a default configuration which enables operation without
any additional safety equipment, see illustration below.
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
5.3.2.2 Connecting emergency stop buttons
In most applications it is required to use one or more extra emergency stop but-
tons. The illustration below shows how one or more emergency stop buttons can
be connected.
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
5.3.2.3 Sharing emergency stop with other machines
It is often desired to set up a common emergency stop circuit when the robot is
used together with other machines. By doing so, the operator does not need to
think about which emergency stop buttons to use.
UR5/CB3 I-32 Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.