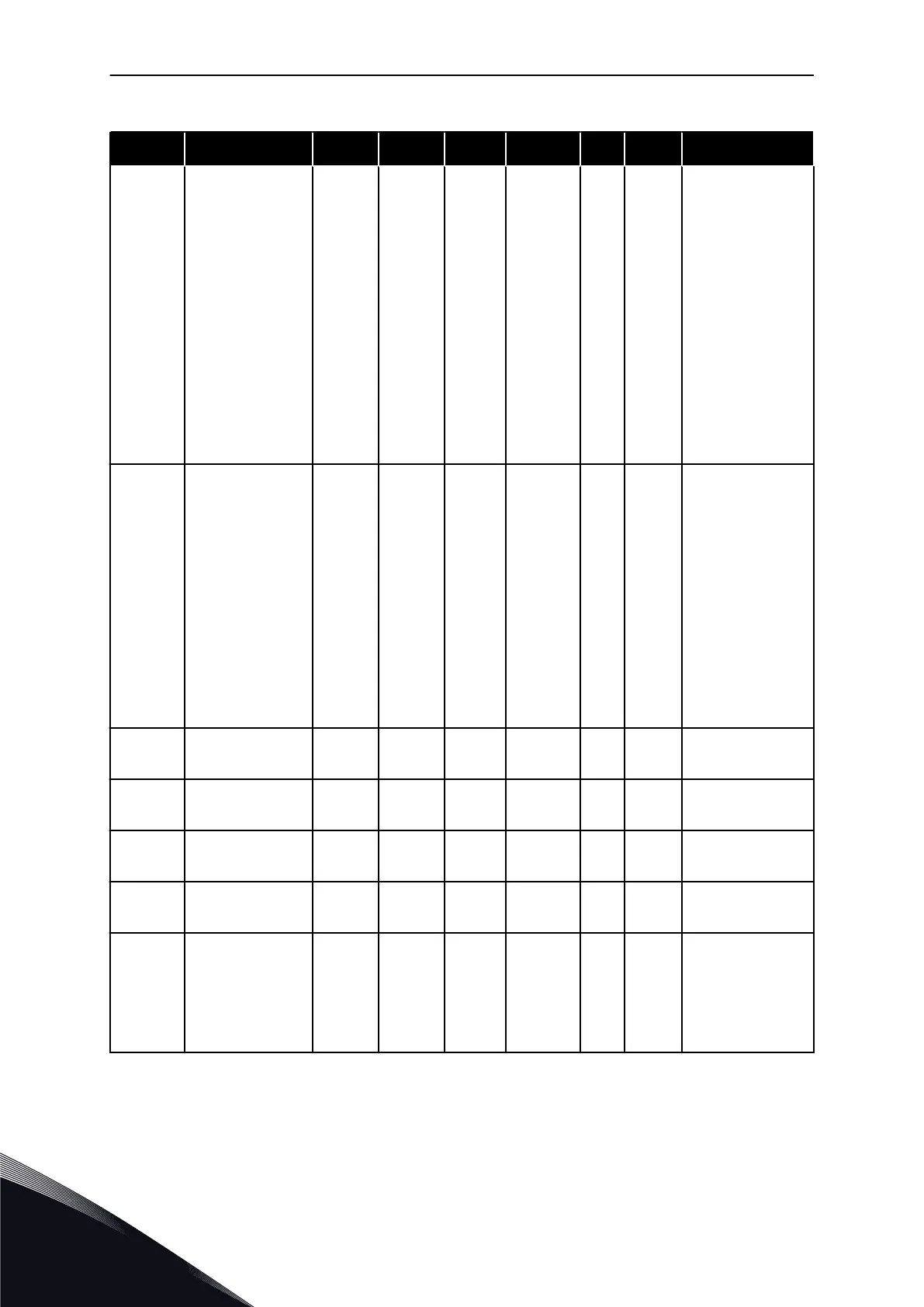
Table 36: Input signals, G2.2
Index Parameter Min Max Unit Default Cust ID Description
P2.2.9 **
Actual value 1
selection
0 10 2 334
0 = Not used
1 = AI1 signal (c-
board)
2 = AI2 signal (c-
board)
3 = AI3
4 = AI4
5 = Fieldbus Proc-
essDataIN2
6 = Motor torque
7 = Motor speed
8 = Motor current
9 = Motor power
10 = Encoder fre-
quency
P2.2.10 **
Actual value 2
input
0 10 0 335
0 = Not used
1 = AI1 signal
2 = AI2 signal
3 = AI3
4 = AI4
5 = Fieldbus Proc-
essDataIN3
6 = Motor torque
7 = Motor speed
8 = Motor current
9 = Motor power
10 = Encoder Fre-
quency
P2.2.11
Actual value 1
minimum scale
–1600.0 1600.0 % 0.0 336
0 = No minimum
scaling
P2.2.12
Actual value 1
maximum scale
–1600.0 1600.0 % 100.0 337
100 = No maximum
scaling
P2.2.13
Actual value 2
minimum scale
–1600.0 1600.0 % 0.0 338
0 = No minimum
scaling
P2.2.14
Actual value 2
maximum scale
–1600.0 1600.0 % 100.0 339
100 = No maximum
scaling
P2.2.15
***
AI1 signal selec-
tion
0.1 E.10 A.1 377
TTF programming
method used. See
Chapter 8.9 "Ter-
minal to function"
(TTF) programming
principle.
VACON · 106 PID CONTROL APPLICATION
5
TEL. +358 (0)201 2121 · FAX +358 (0)201 212 205

 Loading...
Loading...











