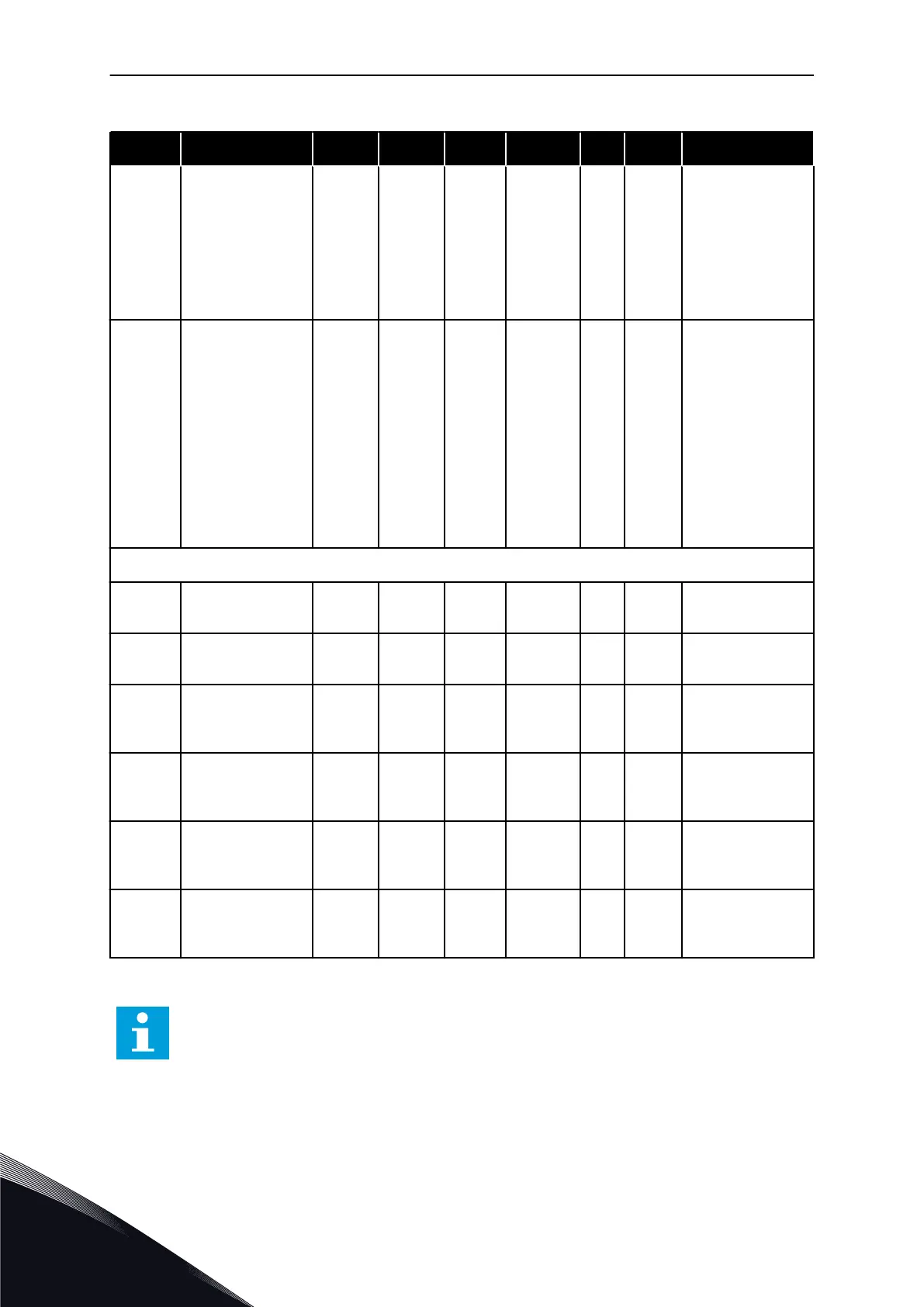
Table 71: Motor control parameters, G2.6
Index Parameter Min Max Unit Default Cust ID Description
P2.6.15 Load drooping 0.00 100.00 % 0.00 620
The drooping func-
tion enables speed
drop as a function
of load. Drooping
will be defined in
percent of nominal
speed at nominal
load.
P2.6.16 Identification 0 1/4 0 631
0 = No action
1 = Identification
w/o run
NXP:
2 = Identification
with run
3 = Encoder ID
Run (PMSM)
4 = Ident All
NXP drives only
P2.6.17 Restart delay 0.100 60000 s Varies 1424
OL delay for coast-
ing stop.
P2.6.18
Load drooping
time
0 32000 ms 0 656
For dynamic
changes.
P2.6.19
Negative fre-
quency limit
-327.67 P2.6.20 Hz -327.67 1286
Alternative limit
for negative direc-
tion.
P2.6.20
Positive frequency
limit
P2.6.19 327.67 Hz 327.67 1285
Alternative limit
for positive direc-
tion.
P2.6.21
Generator torque
limit
0.0 300.0 % 300.0 1288
The maximum tor-
que limit of the
generating side.
P2.6.22
Motoring torque
limit
0.0 300.0 % 300.0 1287
The maximum tor-
que limit of the
motoring side.
* = Parameter value can only be changed after the AC drive has been stopped.
NOTE!
Depending on the application version, the parameter code may appear as 2.6.17.xx
instead of 2.6.23.xx
VACON · 170 MULTI-PURPOSE CONTROL APPLICATION
6
TEL. +358 (0)201 2121 · FAX +358 (0)201 212 205
 Loading...
Loading...












