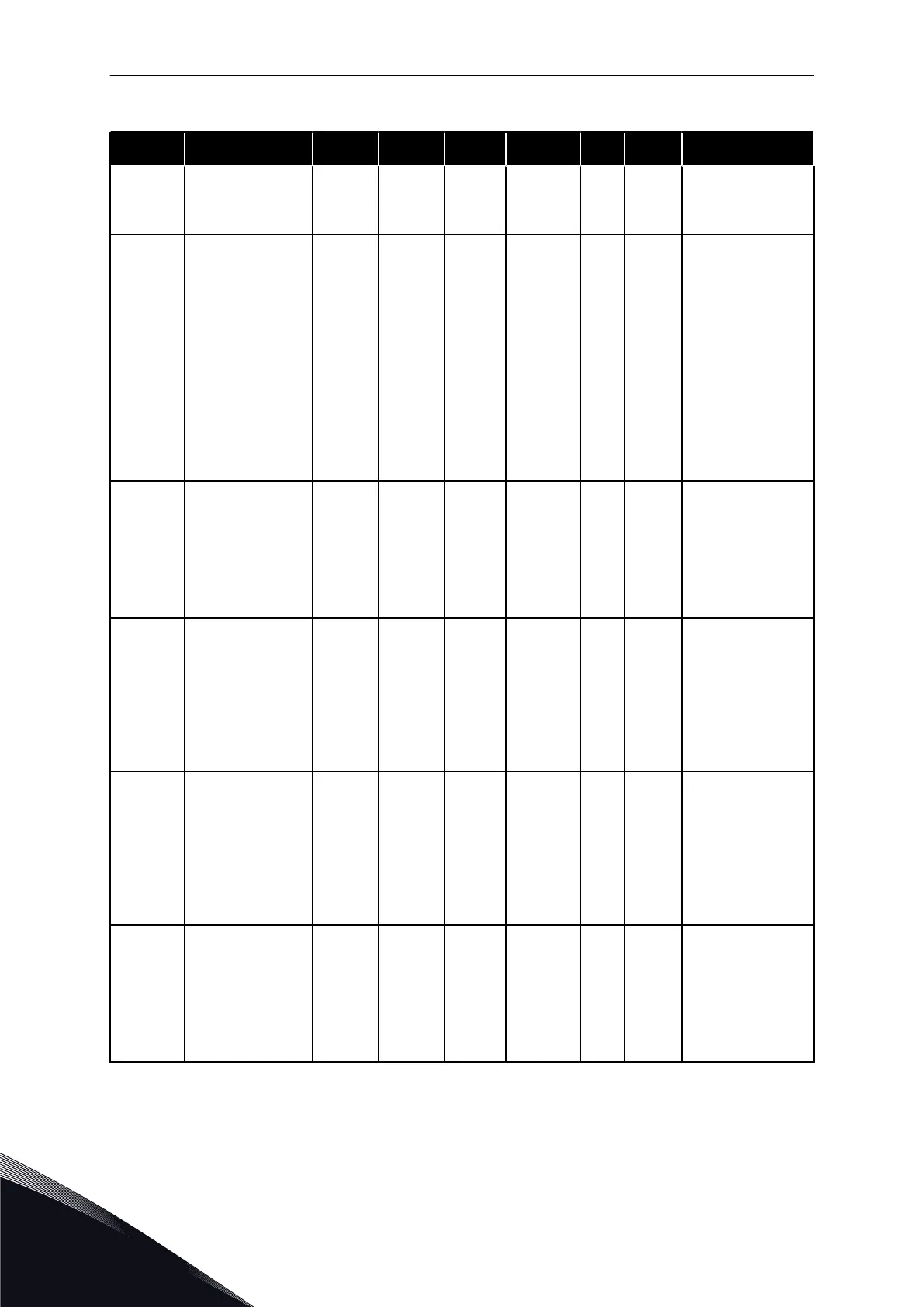
Table 85: Basic parameters G2.1
Index Parameter Min Max Unit Default Cust ID Description
P2.1.10 * Motor cos phi 0.30 1.00 0.85 120
Find the value on
the rating plate of
the motor.
P2.1.11 *
PID controller ref-
erence signal
(Place A)
0 6 4 332
0 = AI1
1 = AI2
2 = AI3
3 = AI4
4 = PID ref from
Keypad control
page, P3.4
5 = PID ref. from
fieldbus (FBPro-
cessDataIN1)
6 = Motor potenti-
ometer
P2.1.12
PID controller
gain
0.0 1000.0 % 100.0 118
If the value of the
parameter is set to
100%, a change of
10% in the error
value causes the
controller output
to change by 10%.
P2.1.13
PID controller I-
time
0.00 320.00 s 1.00 119
If this parameter is
set to 1.00 s, a
change of 10% in
the error value
causes the con-
troller output to
change by
10.00%/s.
P2.1.14
PID controller D-
time
0.00 10.00 s 0.00 132
If this parameter is
set to 1.00 s, a
change of 10% in
the error value
during 1.00 s cau-
ses the controller
output to change
by 10.00%.
P2.1.15 Sleep frequency 0 P2.1.2 Hz 10.00 1016
The drive goes to
sleep mode when
the output fre-
quency stays below
this limit for a lon-
ger time than set
by Sleep Delay.
VACON · 204 PUMP AND FAN CONTROL APPLICATION
7
TEL. +358 (0)201 2121 · FAX +358 (0)201 212 205
 Loading...
Loading...












