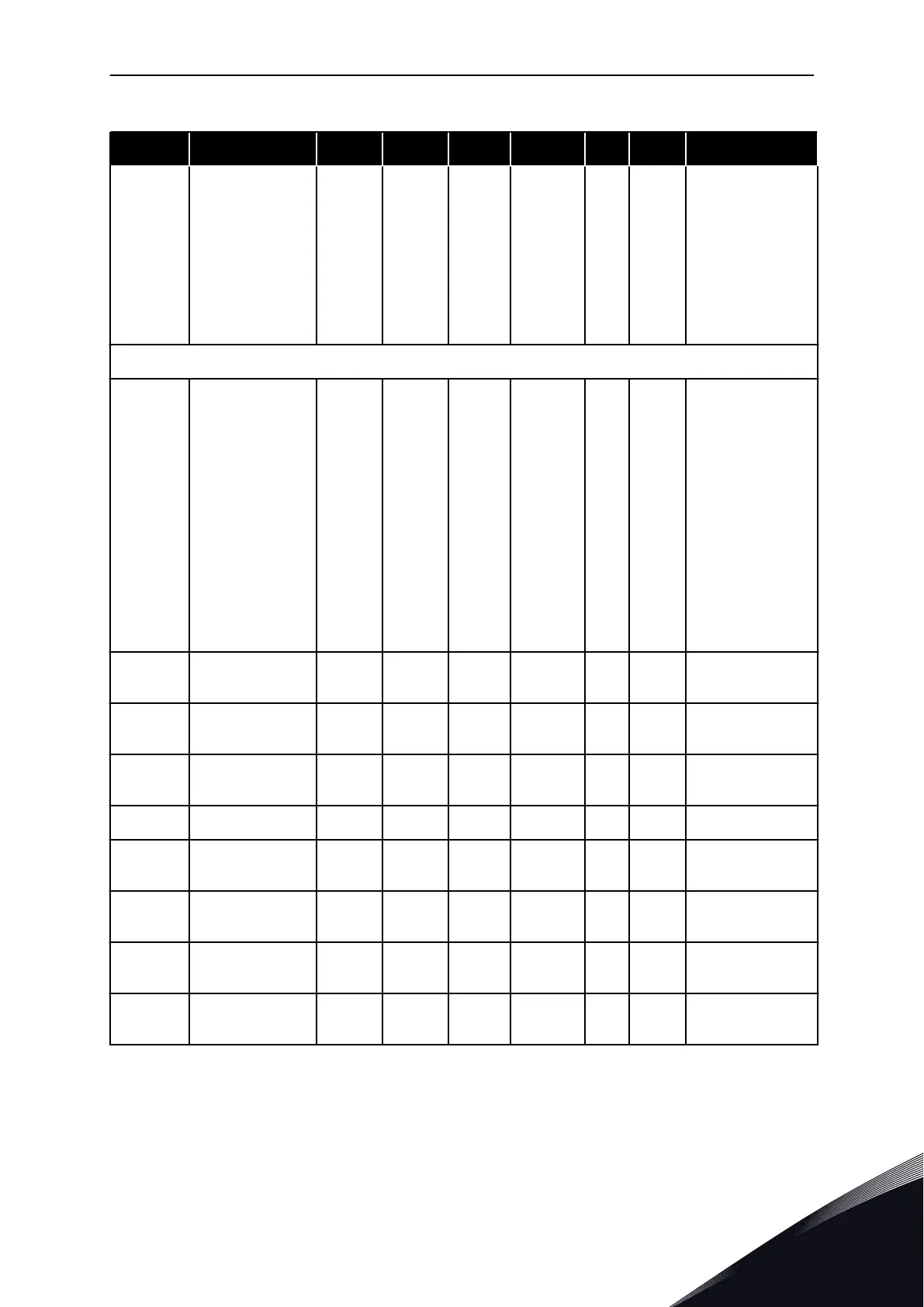
Table 20: Motor control parameters, G2.6
Index Parameter Min Max Unit Default Cust ID Description
P2.6.13 Identification 0 1/2 0 631
0 = No action
1 = Identification
w/o run
2 = Identification
with run
3 = Encoder ID run
4 = No action
5 = ID Run Failed
Closed Loop parameter group 2.6.14
P2.6.14.1
Magnetizing cur-
rent
0.00 2 x I
H
A 0.00 612
The magnetising
current (no-load
current) of the
motor. The mag-
netising current
identifies the val-
ues of the U/f
parameters if they
are given before
the identification
run. If the value is
set to 0, the mag-
netising current is
calculated inter-
nally.
P2.6.14.2
Speed control P
gain
1 1000 30 613
P2.6.14.3
Speed control I
time
0.0 3200.0 ms 30.0 614
P2.6.14.5
Acceleration com-
pensation
0.00 300.00 s 0.00 626
P2.6.14.6 Slip adjust 0 500 % 100 619
P2.6.14.7
Magnetizing cur-
rent at start
0,00 I
L
A 0.00 627
P2.6.14.8
Magnetizing time
at start
0 60000 ms 0 628
P2.6.14.9
0-speed time at
start
0 32000 ms 100 615
P2.6.14.10
0-speed time at
stop
0 32000 ms 100 616
LOCAL/REMOTE CONTROL APPLICATION VACON · 63
24-HOUR SUPPORT +358 (0)201 212 575 · EMAIL: VACON@VACON.COM
3
 Loading...
Loading...












