2 INFORM Explanation
FS100 2.4 Move Instruction : MOVC
2-178
1. Robot teaching position file number /P Variable
number /LP Variable number /P [Array number] /LP
[Array number]
Choose one of the tags from the following table.
2. Base Teaching Position File Number
When a base teaching position file number is selected from the table in
part 1 of this Explanation, added the following tag.
3. Station Teaching Position File Number
When a base teaching position file number is selected from the table in
part 1 of this Explanation, added the following tag.
4. T Point Variable number
When the robot teaching position file number is selected from the table in
part 1 of this Explanation, the following tag can be added or omitted.
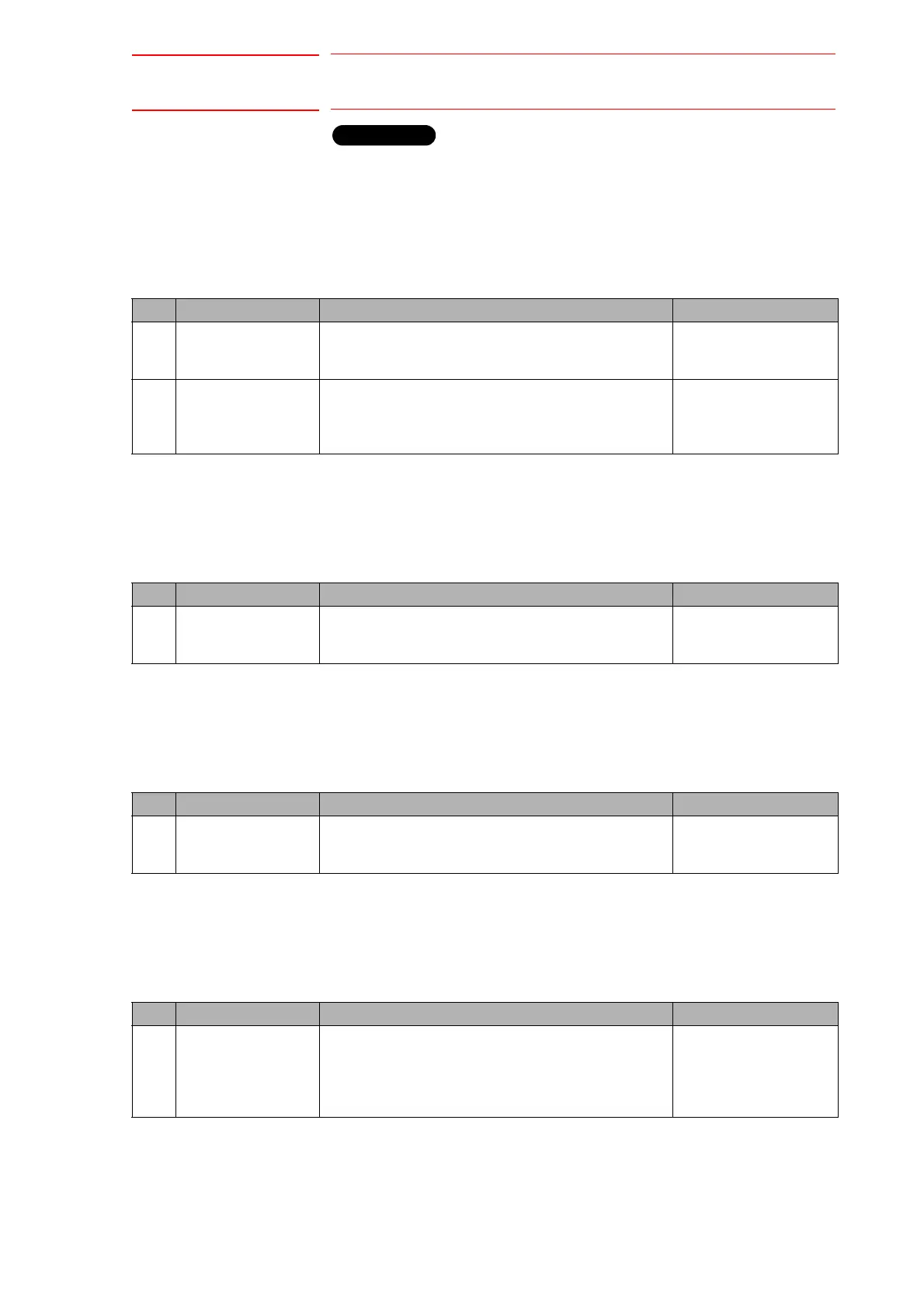
No Tag Explanation Note
1 Robot teaching
position file number
The robot axis teaching position in each step is written
in this file unconditionally when the step is taught. This
teaching position cannot be edited.
On the job display, this
tag is not displayed.
2 P Variable number/
LP Variable number/
P [Array number]/
LP [Array number]
Specifies the position variable number of the robot axis.
Moves to the position data set in the variable of the
specified number.
Variable number:
000 to 127
No Tag Explanation Note
3 Base teaching
position file number
The base axis teaching position in each step is written
in this file unconditionally when the step is taught. This
teaching position cannot be edited.
On the job display, this
tag is not displayed.
No Tag Explanation Note
4 Station teaching
position file number
The station axis teaching position in each step is written
in this file unconditionally when the step is taught. This
teaching position cannot be edited.
On the job display, this
tag is not displayed.
No Tag Explanation Note
5 T Point Variable
number
Specifies the point variable number.
The point variable manages the teaching position
registered in the job, and is used to move the
manipulator to the same position several times in one
job.
Available only with the
optional point variable
function.

 Loading...
Loading...













