4
Motion Parameters
4.3.2
Motion Setting Parameter Details
4-42
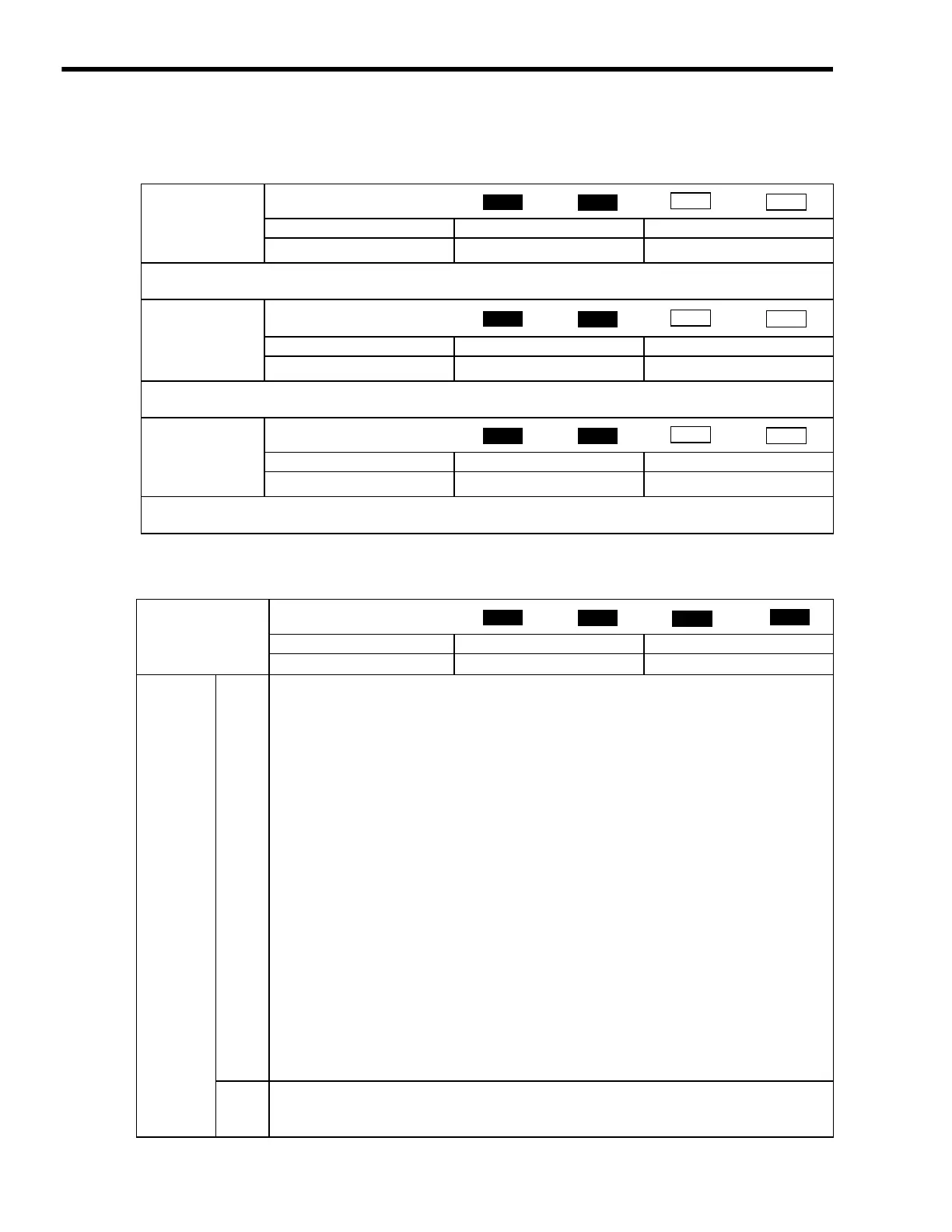
( 28 ) Coordinate System Settings
( 29 ) SERVOPACK User Monitor
OL
48
Zero Point Offset
Setting Range Setting Unit Default Value
−
2
31
to 2
31
−
1
Reference unit 0
Set the offset to shift the machine coordinate system.
Note: This parameter is always enabled, so make sure that the setting is correct.
OL
4A
Work Coordinate System
Offset
Setting Range Setting Unit Default Value
−
2
31
to 2
31
−
1
Reference unit 0
Set the offset to shift the work coordinate system.
Note: This parameter is always effective, so make sure that the setting is correct.
OL
4C
Preset Data of POSMAX Turn
Setting Range Setting Unit Default Value
−
2
31
to 2
31
−
1
Rev 0
When the POSMAX Preset bit (setting parameter OW
00, bit 6) is set to 1, the value set here will be preset as the POSMAX
Number of Turns (monitoring parameter IL
1E).
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
Position
Phase
Speed
Torque
OW
4E
Servo User Monitor
Setting Range Setting Unit Default Value
−−0E00H
OW
4E
Bit 4 to
Bit 7
Monitor 2
Monitor 2 is used with the MECHATROLINK-I and the MECHATROLINK-II in 17-byte Mode when
bit 0 of OW
02 is 1.
0: Reference position in command coordinate system (reference unit)
1: Reference position in machine coordinate system (reference unit)
2: Following error (reference unit)
3: Feedback position in machine coordinate system (reference unit)
4: Feedback latch position in machine coordinate system (reference unit)
5: Reference position in command coordinate system (reference unit)
6: Target position in command coordinate system (reference unit)
7: Reserved
8: Feedback speed (position/torque control: reference units/s, speed control: maximum speed/
40000000 hex)
9: Command speed (position/torque control: reference units/s, speed control: maximum speed/
40000000 hex)
A: Target speed (position/torque control: reference units/s, speed control: maximum speed/40000000
hex)
B: Torque reference (position/speed control: reference units/s, torque control: maximum torque/
40000000 hex)
C: Reserved
D: Reserved
E: Option Monitor 1 (default)
F: Option Monitor 2
Bit C to
Bit F
Monitor 4
Monitor 4 is used only with the MECHATROLINK-II in 32-byte Mode.
0 to F: Same as for Monitor 2.
Position
Phase
Speed
Torque
WWW.NNC.IR