Fieldbus PCI-Card
Fieldbus interface
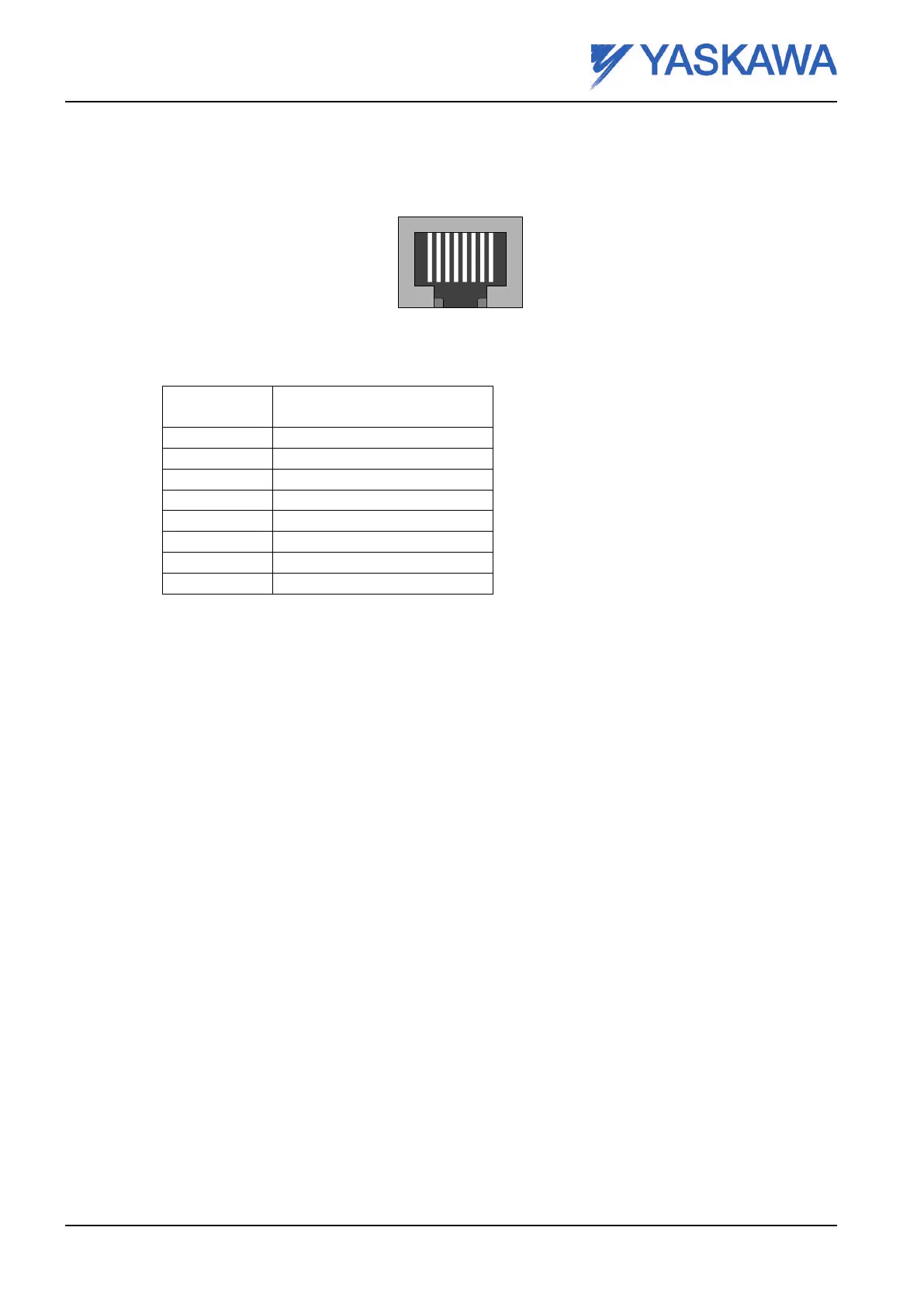
Fig. 45 RJ45 female layout
Pin RJ45
(Female) Signal
1 TD+
2 TD-
3 RD+
4 Termination
5 Termination
6 RD-
7 Termination
8 Termination
11.3 Network setup
To configure the EtherNet/IP fieldbus network RS-Networx is used.
When configuring the HMS Ethernet/IP scanner it must be in ”idle” mode. One way to change
between “idle” and “run” mode is to access the PCI board’s on-board http server. Use any standard
webbrowser and write the IP address of the board in the address-field.
The IP address on the board is set with the HMS “Anybus IPconfig” tool which can be downloaded
from the HMS support webpage.
See section 4 General installation in IP-based networks.
11.3.1 Introduction to Scanlist
This functionality is supported if the robot controller has a HMSAB.DRV version 1.5.15.9 (DX100) or
1.4.18.9 (NX100/NXC100) or later. Date for release is 2013-01-08. All versions for DX200.
The AB3607 card must have version 1.08 or newer. Version can be seen in the AnyBus IPConfig tool.
The scanner starts to scan EtherNet/IP slaves when set in RUN-mode according to the configured
scanlist. This scanlist can be accessed via Explicit CIP-messages via Ethernet or via WEB-pages by
the help of two SSI-commands.
11.3.2 Scanlist via web-pages
The module must be in Scanner mode Idle to be able to change the scanlist. The default WEB-pages
have this enabled via the check box on the first page.
Page 54 Reg.No. ME00107EN-02

 Loading...
Loading...














