Command Reference
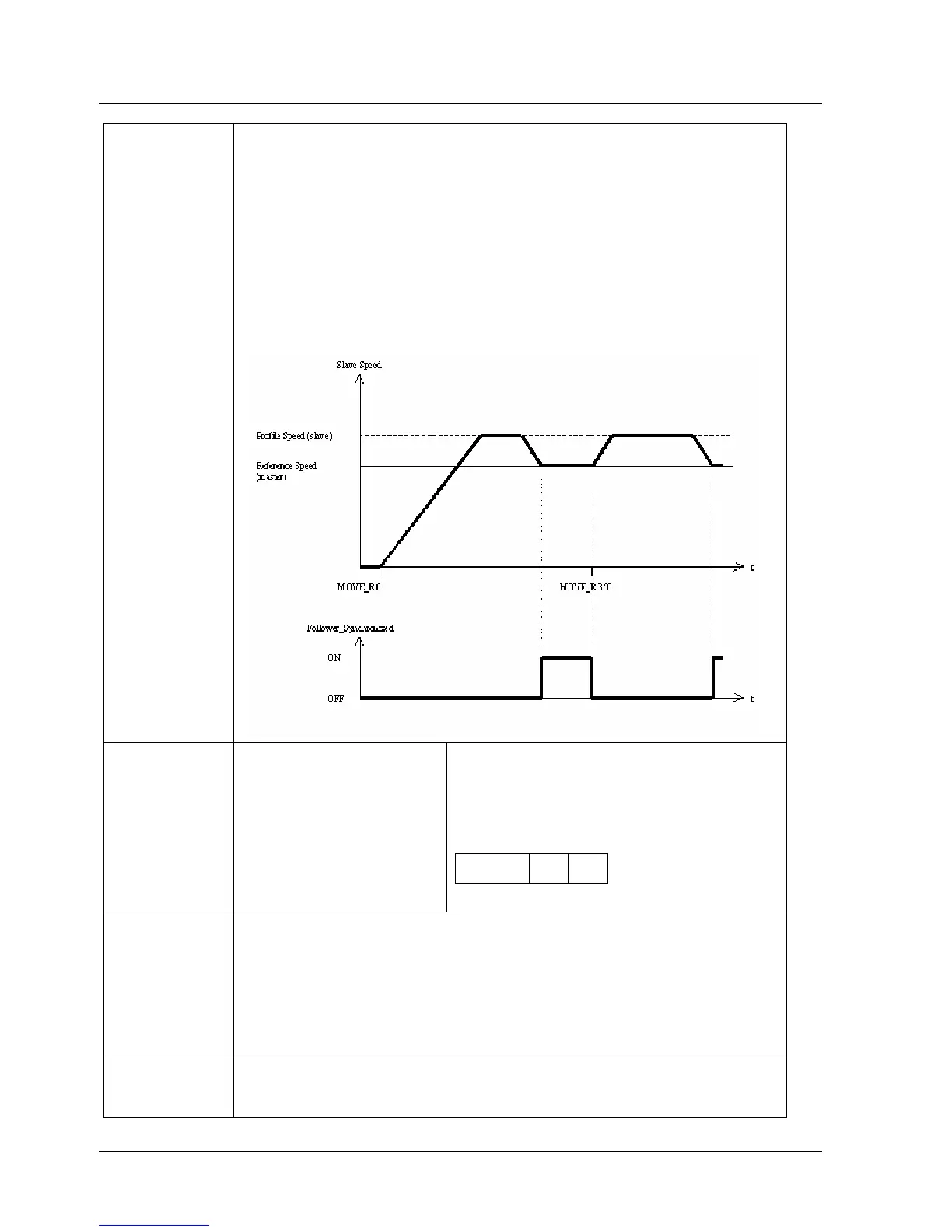
Description Starts synchronization to a master encoder (external pulse source)
in terms of speed and position. As soon as the command is issued,
the XtraDrive starts to count the incoming pulses and accelerates
at the profile acceleration (see section
12.2.2, Profile Acceleration)
rate. It reaches maximum speed as defined by the profile velocity
(see section
12.2.1, Profile Velocity) in order to meet the master
encoder and keep the smallest possible distance from it.
Specifying <distance> other than zero can create motion relative
to the master encoder. Relative motion can be performed while
moving as well, as shown in the diagram below.
Syntax
Arguments
distance Specifies the offset from master
encoder. The command adds
<distance> to the Target_position.
[as per electronic gear, see
12.1,
Electronic Gear]
Serial
4 V
Example SET_ZERO_POSITION Demand_Position
MOVE_R 0
WAIT_VAR Follower_synchronized = 1
MOVE_R 350
WAIT_VAR Position_demand_value >= 6000
STOP_EX Emergency Servo ON
END
Example
Explanation
MOVE_R 0: Motor starts responding to an input pulse train. When
the motor is synchronized to master, a relative motion of 350 units
starts. When the motor has moved a total of 6000 user units it
XtraWare User Manual 143