The Main Screen Interface
XtraWare User Manual 17
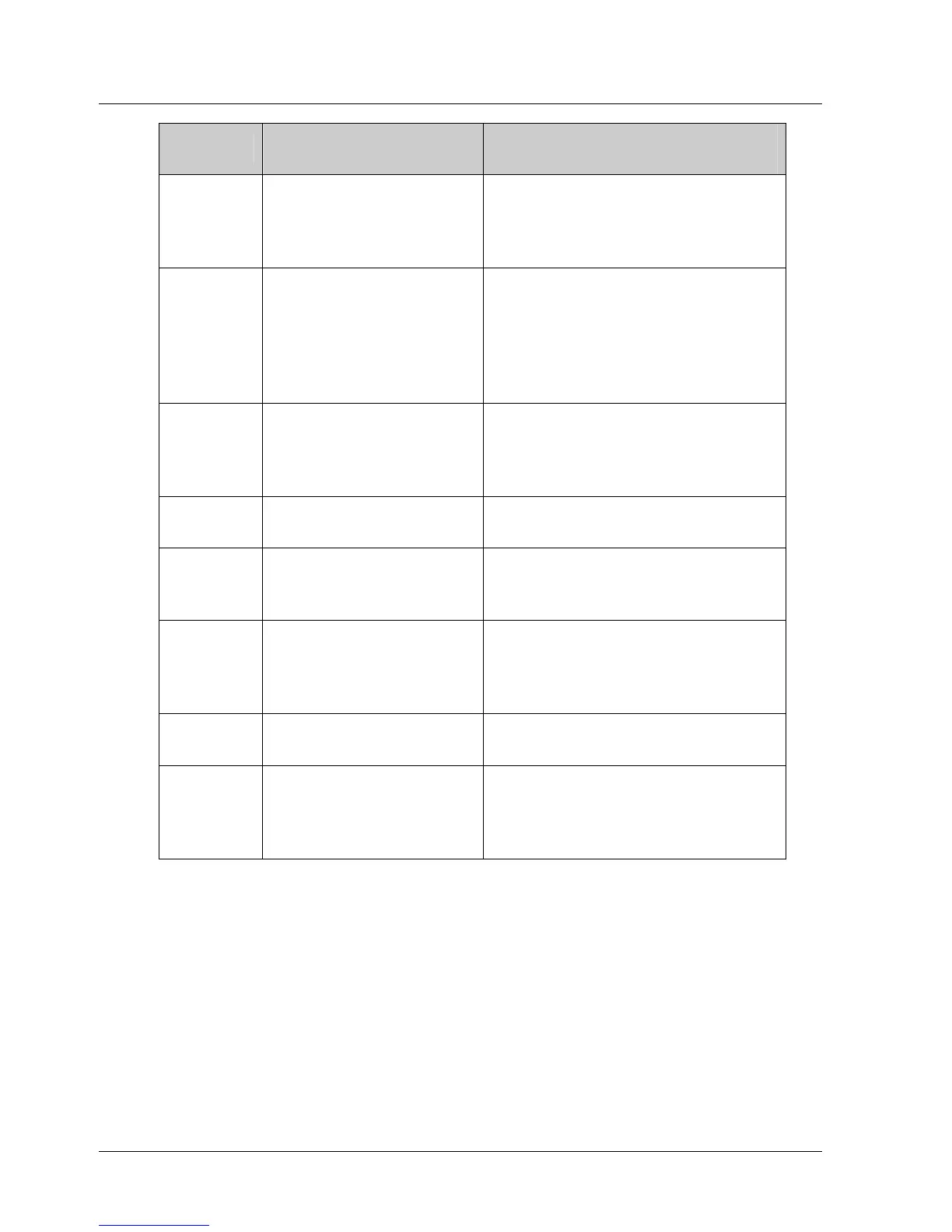
Group Description
Included Commands
(examples)
Interrupt Specifies the interrupt
routines to be run for
various interrupt
events.
EXT_INT, INT, INT_RETURN
Motion Controls motor
motion.
GO, GO_D, GO_H, MOVE,
MOVE_D, MOVE_H, MOVE_R,
SLIDE, SLIDE_ANALOG,
SPEED_CONTROL, START,
STOP_EX, TORQUE,
TORQUE_ANALOG
Motion
Profile
Changes the default
values of speed,
acceleration and jerk
time.
ACCELERATION, JERK_TIME,
SPEED
Output Sets output ON/OFF. FAST_OUTPUT_SETTING,
SET_OUTPUT, SET_OUTPUTS;
Program
Flow
Control
Program flow handling
commands.
CALL, END, GO_TO, IF,
IF_INPUT, INPUT_CASE, LABEL,
LOOP, RETURN, RUN
System Enables and disables
SERVO control in the
program. Sets gain
and torque limits.
CONTROL, GAIN,
TORQUE_LIMITS,
ELECTRONIC_GEAR
Variables Sets variable values in
the program.
MATH, READ_FROM_ARRAY,
SET_VAR, WRITE_TO_ARRAY
Wait Delays program flow,
either for a specified
time or until a
condition is met.
DELAY, WAIT_EXACT,
WAIT_FOR_START,
WAIT_INPUT, WAIT_STOP,
WAIT_VAR
3.5.3. Program Window
The Program Window (Figure 10) displays the entire program. The program
is written by selecting commands from the Command tab, and entering
values for the commands’ parameters. See section
4.4.1, Writing a
Program, for details on how to write a program.