Operating the XtraDrive Using XtraWare
Interrupt_ reg:
Because only bit 3 is set to 1 in the Interrupt_mask variable, only interrupt
3 will be handled; interrupts 4 and 1 will be ignored. Only bit 3 in
Interrupt_pending will be set to 1, as it is the only bit set to 1 in both
Interrupt_request and Interrupt_mask:
Bit# 7 6 5 4 3
2
1
0
Setting 0 0 0 0 1
0
0
0
Variable value: Interrupt_pending = 8
4.11.7. Interrupt Commands
Commands are used to signal the beginning and the end of each interrupt
service routine. The commands INT and EXT_INT signal the beginning of
interrupt service routines, and specify the internal or external interrupt
conditions respectively. The command INT_RETURN signals the end of the
interrupt service routine, and specifies the program line to which to return.
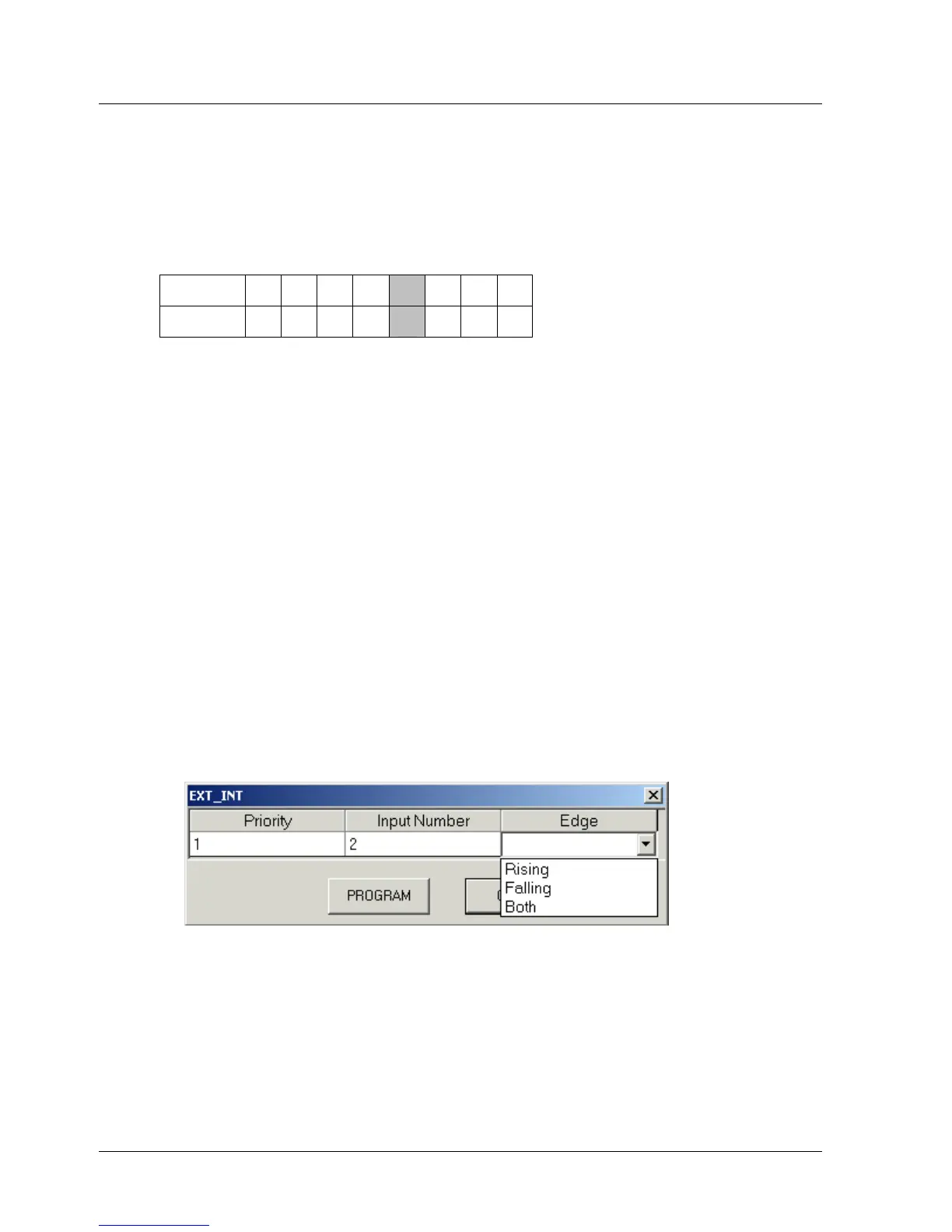
4.11.7.1. EXT_INT
Format: EXT_INT <Priority> <Input_Number> <Edge>
This command indicates the beginning of an interrupt service routine when
the interrupt is conditional on the value of an external input. The argument
<Priority> specifies the interrupt priority. <Priority> is specified as a value
from 0 to 7, where 0 is the highest priority and 7 is the lowest.
<Input_Number> specifies the number of the digital input to be monitored.
<Edge> specifies whether the interrupt is to be triggered when the value of
the digital input changes from 0 to 1 (Rising), from 1 to 0 (Falling), or
whenever it changes (Both).
Figure 53: Programming an EXT_INT Command
4.11.7.2. INT
Format: INT <Priority> <Variable> <Condition> <Value>
This command indicates the beginning of an interrupt service routine, and is
used when the interrupt is conditional on the value of an internal variable.
The argument <Priority> specifies the input priority. <Priority> is specified
80 XtraWare User Manual