Command Reference
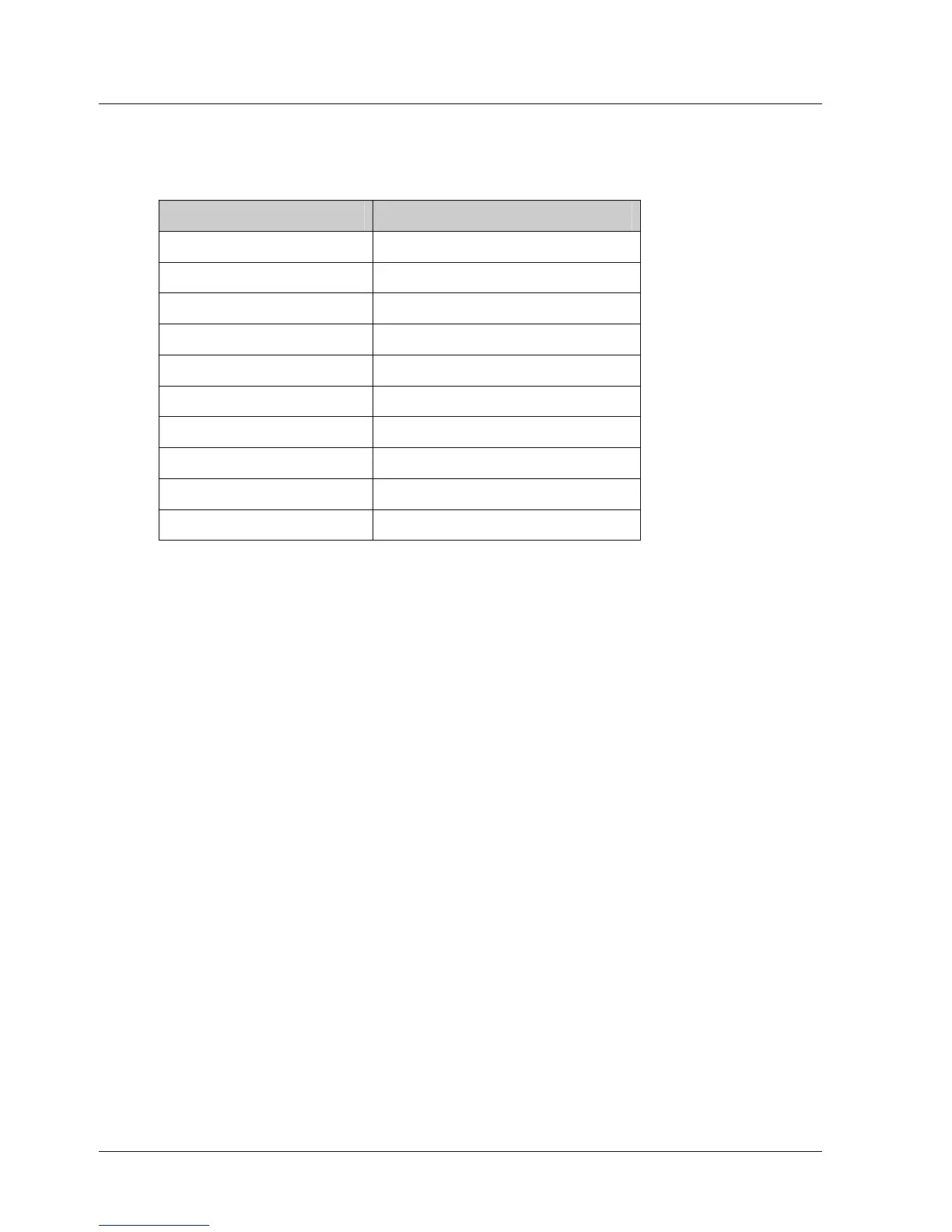
The value of the Motion_mode variable corresponding to each motion mode
is shown below.
Table 15: Mode of Operation Values
Motion mode name Motion mode value
POSITION 1
VELOCITY 3
TORQUE 4
HOMING 6
SPEED_CONTROL 0
HUNTING -1
PULSE_TRAIN -3
ANALOG_SPEED -4
ANALOG_TORQUE -5
ECAM -7
5.3.1. Transition Between Motion Modes
When motion commands that function under different motion modes are
issued consecutively, in some cases the motor will first be stopped, at the
Profile_acceleration, and only then will the second motion commence. In
other cases, the second motion will start continuously after the first, without
stopping in between.
The table below specifies the type of transition between each pair of motion
modes:
♦ C: Continuous transition without stopping.
♦ S: The motor will first decelerate to a complete stop according to
Profile_acceleration before performing the new motion. The command
smoothing set by Pn216 will not be applied to the deceleration.
XtraWare User Manual 91