n
H5-04: Stopping Method after Communication Error
Selects the stopping method after a communications error (CE) has occurred.
No. Name Setting Range Default
H5-04 Stopping Method after CE 0 to 4 3
Setting 0: Ramp to Stop
Uses the deceleration time currently enabled.
Setting 1: Coast to Stop
Setting 2: Fast Stop
Setting 3: Alarm Only - Operation Continues
Setting 4: Run at d1-04
n
H5-05: Communication Fault Detection Selection
Enables or disables the CE detection for communications.
No. Name Setting Range Default
H5-05 Communication Fault Detection Selection 0 or 1 1
Setting 0: Disabled
No communication error detection. The drive continues operation.
Setting 1: Enabled
If the drive does not receive data from the master for longer than the time set to H5-09, then a CE fault will be triggered and
the drive will operate as determined by parameter H5-04.
n
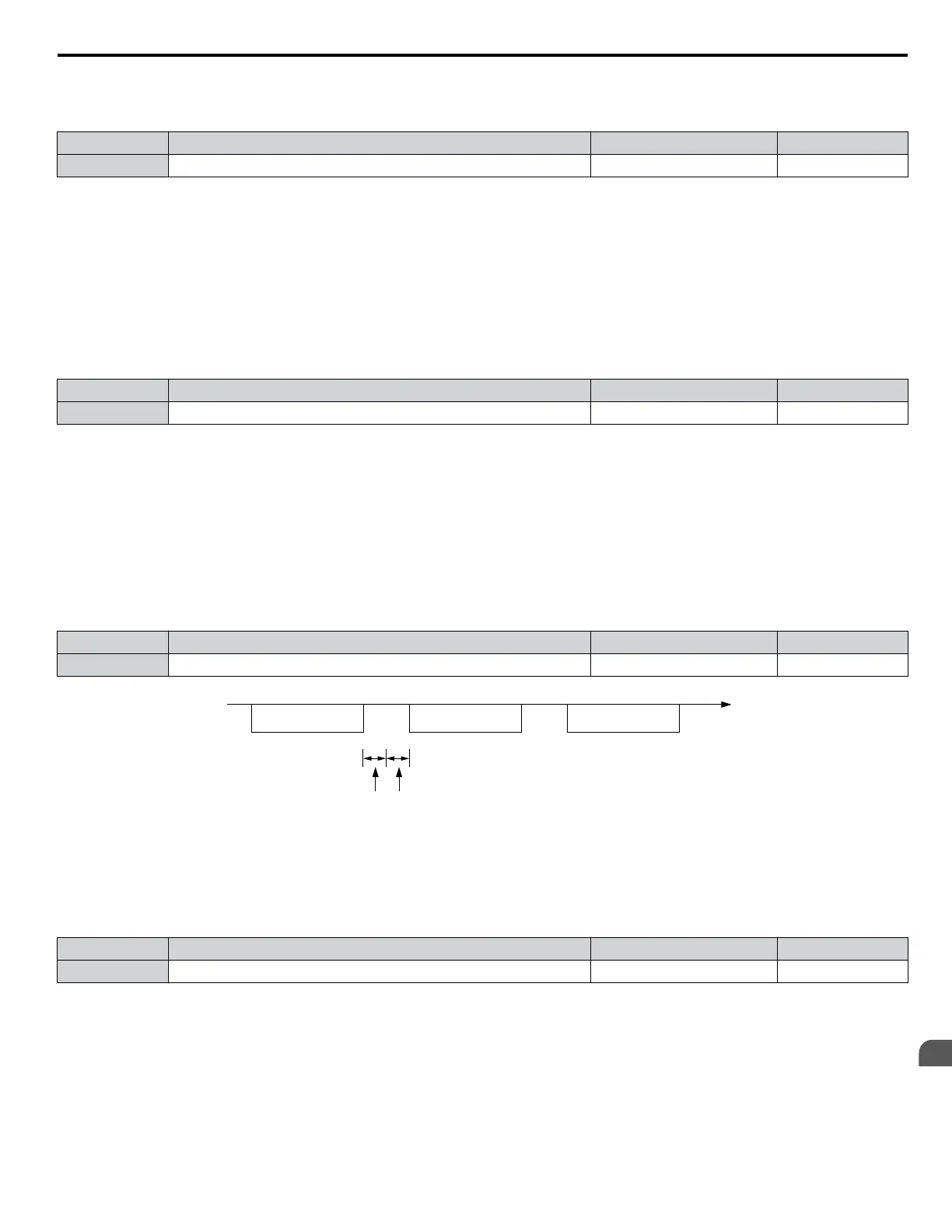
H5-06: Drive Transmit Wait Time
Sets the time the drive waits after receiving data from a master until responding data.
Note: Cycle power for the setting to take effect.
No. Name Setting Range Default
H5-06 Drive Transmit Wait Time 5 to 65 ms 5 ms
Command message Response message Command message
Controller→Drive →Drive
→Controller
Time
24-bit length
H5-06 setting
Drive
Controller
Figure B.4 Drive Transmit Wait Time Setting
n
H5-07: RTS Control Selection
Enables or disables RTS control.
Note: Cycle power for the setting to take effect.
No. Name Setting Range Default
H5-07 RTS Control Selection 0 or 1 1
Setting 0: Disabled. RTS is always on.
Use this setting with point-to-point RS-422 communications.
Setting 1: Enabled. RTS switches while sending.
Use this setting with RS-485 communications or when using multi-drop RS-422 communications.
B.4 BACnet Setup Parameters
YASKAWA SIEP YAIZ1U 03B YASKAWA AC Drive – Z1000 Programming Manual
251
B
BACnet
Communications

 Loading...
Loading...










