u
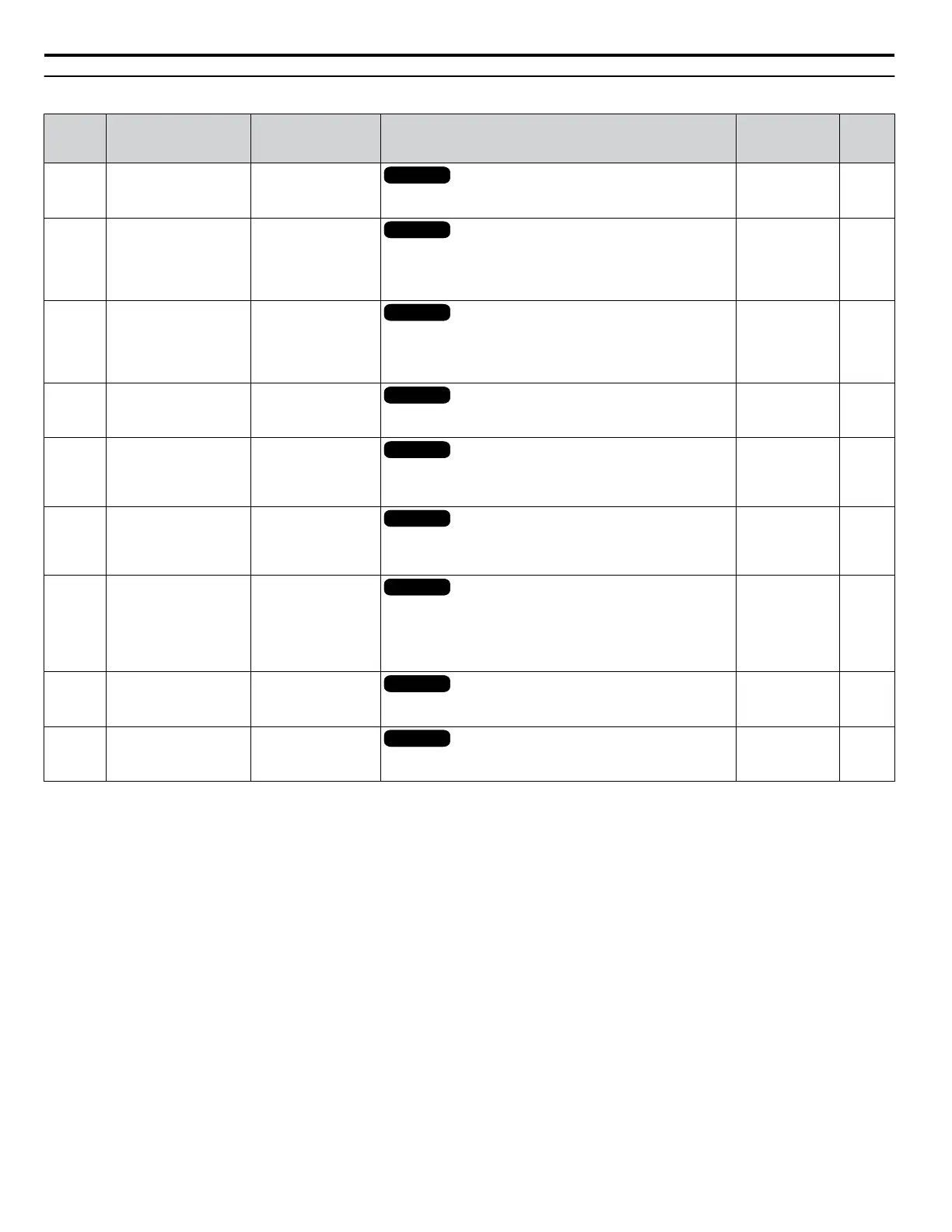
n8: PM Motor Control Tuning
No.
(Addr.
Hex)
Name LCD Display Description Values Page
n8-45
(538)
Speed Feedback
Detection Control Gain
PM Spd Fdbk Gain
OLV/PMOLV/PM
Increase this setting if hunting occurs. Decrease to lower the
response.
Default: 0.80
Min.: 0.00
Max.: 10.00
125
n8-47
(53A)
Pull-In Current
Compensation Time
Constant
PM Pull-in I Tc
OLV/PMOLV/PM
Sets the time constant to make the pull-in current reference and
actual current value agree. Decrease the value if the motor
begins to oscillate, and increase the value if it takes too long for
the current reference to equal the output current.
Default: 5.0 s
Min.: 0.0
Max.: 100.0
126
n8-48
(53B)
Pull-In Current PM No-load Curr
OLV/PMOLV/PM
Defines the d-Axis current reference during no-load operation
at a constant speed. Set as a percentage of the motor rated
current. Increase this setting if hunting occurs while running at
constant speed.
Default: 30%
Min.: 20
Max.: 200
126
n8-49
(53C)
d-Axis Current for High
Efficiency Control
EnergySav ID Lvl
OLV/PMOLV/PM
Sets the d-Axis current reference when running a high load at
constant speed. Set as a percentage of the motor rated current.
Default:
<1>
Min.: -200.0%
Max.: 0.0%
126
n8-51
(53E)
Acceleration/
Deceleration Pull-In
Current
PM Pull-in I@Acc
OLV/PMOLV/PM
Sets the d-Axis current reference during acceleration/
deceleration as a percentage of the motor rated current. Set to a
high value when more starting torque is needed.
Default: 50%
Min.: 0
Max.: 200
126
n8-54
(56D)
Voltage Error
Compensation Time
Constant
PM V Error CompT
OLV/PMOLV/PM
Adjusts the value when hunting occurs at low speed. If hunting
occurs with sudden load changes, increase n8-54 in increments
of 0.1. Reduce this setting if oscillation occurs at start.
Default: 1.00 s
Min.: 0.00
Max.: 10.00
126
n8-55
(56E)
Load Inertia
PMLoad wk2 Ratio
0: Less than 1:10
1: 1:10 to 1:30
2: 1:30 to 1:50
3: More than 1:50
OLV/PMOLV/PM
Sets the ratio between motor and machine inertia.
0: Lower than 1:10
1: Between 1:10 to 1:30
2: Between 1:30 to 1:50
3: Higher than 1:50
Default: 0
Min.: 0
Max.: 3
127
n8-62
(57D)
Output Voltage Limit PM Vout Limit
OLV/PMOLV/PM
Prevents output voltage saturation. Should be set just below the
voltage provided by the input power supply.
Default: 575.0 V
Min.: 0.0
Max.: 661.3
127
n8-65
(65C)
Speed Feedback
Detection Control Gain
during ov Suppression
SFdbk G @OV Supp
OLV/PMOLV/PM
Sets the gain used for internal speed feedback detection during
ov suppression.
Default: 1.50
Min.: 0.00
Max.: 10.00
127
<1> Default setting is dependent on parameter o2-04, Drive Model Selection.
A.11 n: Special Adjustment
220
YASKAWA SIEP YAIZ1U 03B YASKAWA AC Drive – Z1000 Programming Manual

 Loading...
Loading...










