Parameters 179
25.06 Acc comp derivation
time
Defines the derivation time for acceleration(/deceleration)
compensation. In order to compensate for a high inertia
load during acceleration, a derivative of the reference is
added to the output of the speed controller. The principle
of a derivative action is described under parameter 25.04
Speed derivation time.
Note: As a general rule, set this parameter to the value
between 50 and 100% of the sum of the mechanical time
constants of the motor and the driven machine.
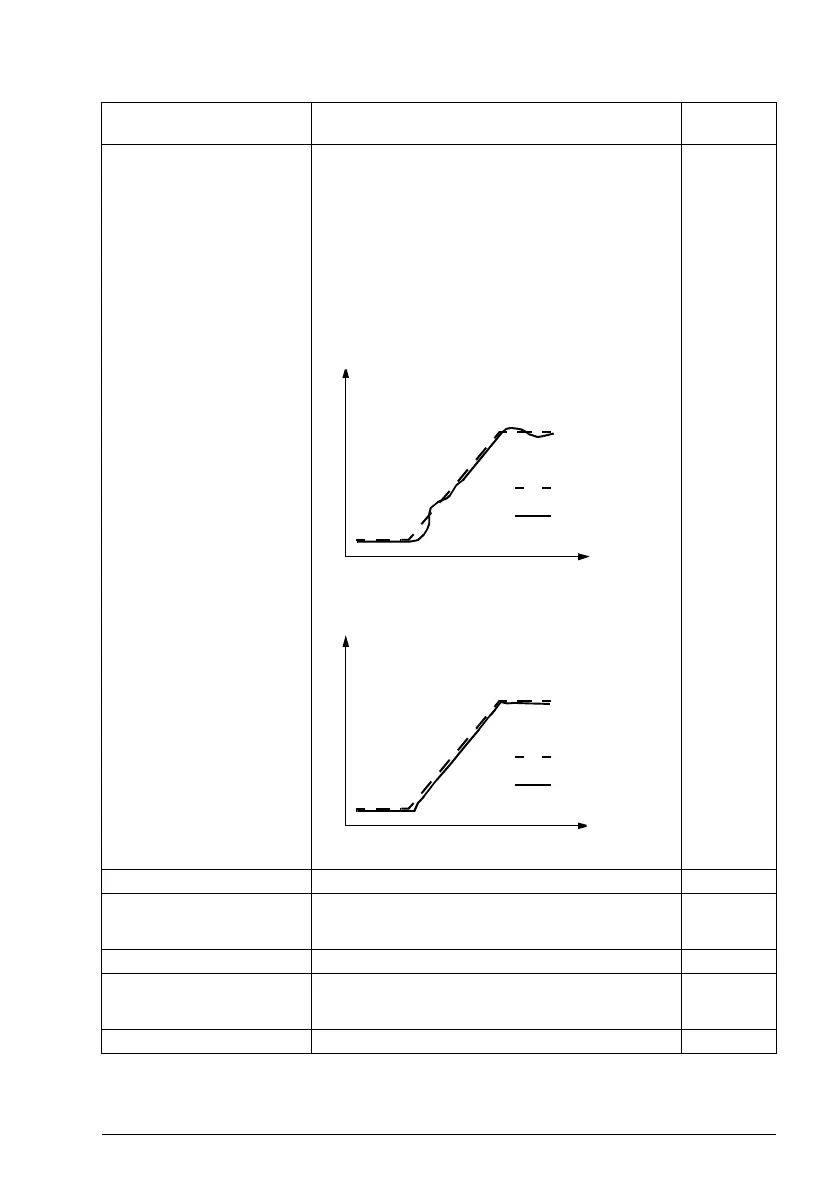
The figure below shows the speed responses when a high
inertia load is accelerated along a ramp.
No acceleration compensation:
Acceleration compensation:
0.00 s
0.00…1000.00 s Acceleration compensation derivation time. 10 = 1 s
25.07 Acc comp filter time Defines the acceleration (or deceleration) compensation
filter time constant. See parameters 25.04 Speed
derivation time and 25.06 Acc comp derivation time.
8.0 ms
0.0…1000.0 ms Acceleration/deceleration compensation filter time. 1 = 1 ms
25.15 Proportional gain em
stop
Defines the proportional gain for the speed controller
when an emergency stop is active. See parameter 25.02
Speed proportional gain.
10.00
1.00…250.00 Proportional gain upon an emergency stop. 100 = 1
No. Name/Value Description Default
FbEq 16
Time
Speed reference
Actual speed
Time
Speed reference
Actual speed

 Loading...
Loading...










