Parameters 197
30.14 Maximum frequency Defines the maximum allowed frequency.
WARNING! This value must not be lower than
30.13 Minimum frequency.
WARNING! In frequency control mode only.
50.00 Hz
-500.00…500.00 Hz Maximum frequency. See par.
46.02
30.17 Maximum current Defines the maximum allowed motor current. 0.00 A
0.00…30000.00 A Maximum motor current. 1 = 1 A
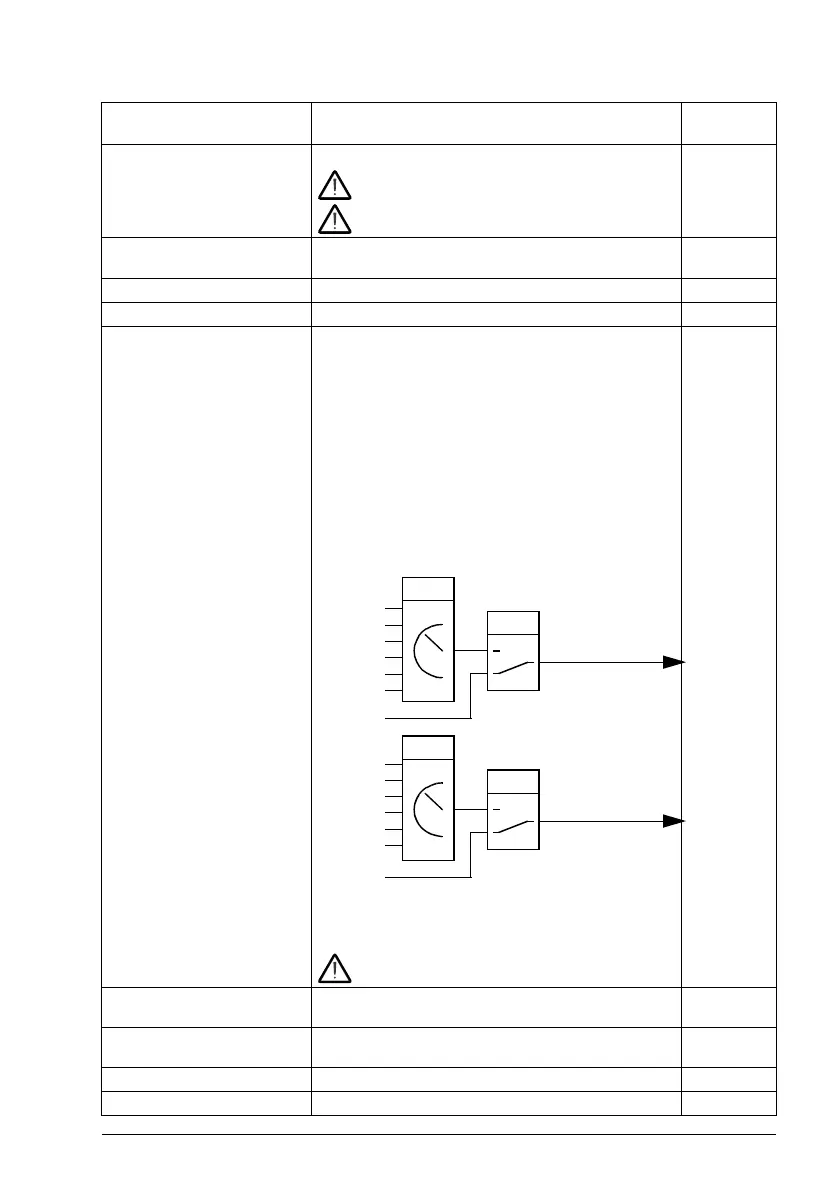
30.18 Torq lim sel Selects a source that switches between two different
predefined minimum torque limit sets.
0 = minimum torque limit defined by 30.19 and maximum
torque limit defined by 30.20 are active
1 = minimum torque limit selected by 30.21 and maximum
torque limit defined by 30.22 are active
The user can define two sets of torque limits, and switch
between the sets using a binary source such as a digital
input.
The first set of limits is defined by parameters 30.19 and
30.20. The second set has selector parameters for both
the minimum (30.21) and maximum (30.22) limits that
allows the use of a selectable analog source (such as an
analog input).
Note: In addition to the user-defined limits, torque may be
limited for other reasons (such as power limitation). Refer
to the block diagram on page 389.
WARNING! In torque control mode (vector motor
control) only.
Torque limit
set 1
Torque limit set 1 0 (minimum torque limit defined by 30.19 and maximum
torque limit defined by 30.20 are active).
0
Torque limit set 2 1 (minimum torque limit selected by 30.21 and maximum
torque limit defined by 30.22 are active).
1
DI1 Digital input DI1 (10.02 DI delayed status, bit 0). 2
DI2 Digital input DI2 (10.02 DI delayed status, bit 1). 3
No. Name/Value Description Default
FbEq 16
30.21
User-defined
minimum torque
limit
0
AI1
AI2
PID
30.23
Other
0
AI1
AI2
PID
30.24
Other
30.19
30.22
30.18
0
1
30.20
30.18
0
1
User-defined
maximum torque
limit

 Loading...
Loading...










