Inspection of mechanical stop pin, axis 1
Use this procedure to inspect the mechanical stop pin, axis 1.
NoteAction
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot work-
ing area.
1
See the figure in:
• Location of mechanical stop pin,
axis 1 on page 137
Regularly check that the mechanical stop pin
is not bent or damaged in any other way.
2
How to replace the stop pin is described
in section Replacing stop pin axis 1 on
page 286.
Note
If the mechanical stop pin has been deformed
or damaged, all of its mounting parts have to
be replaced.
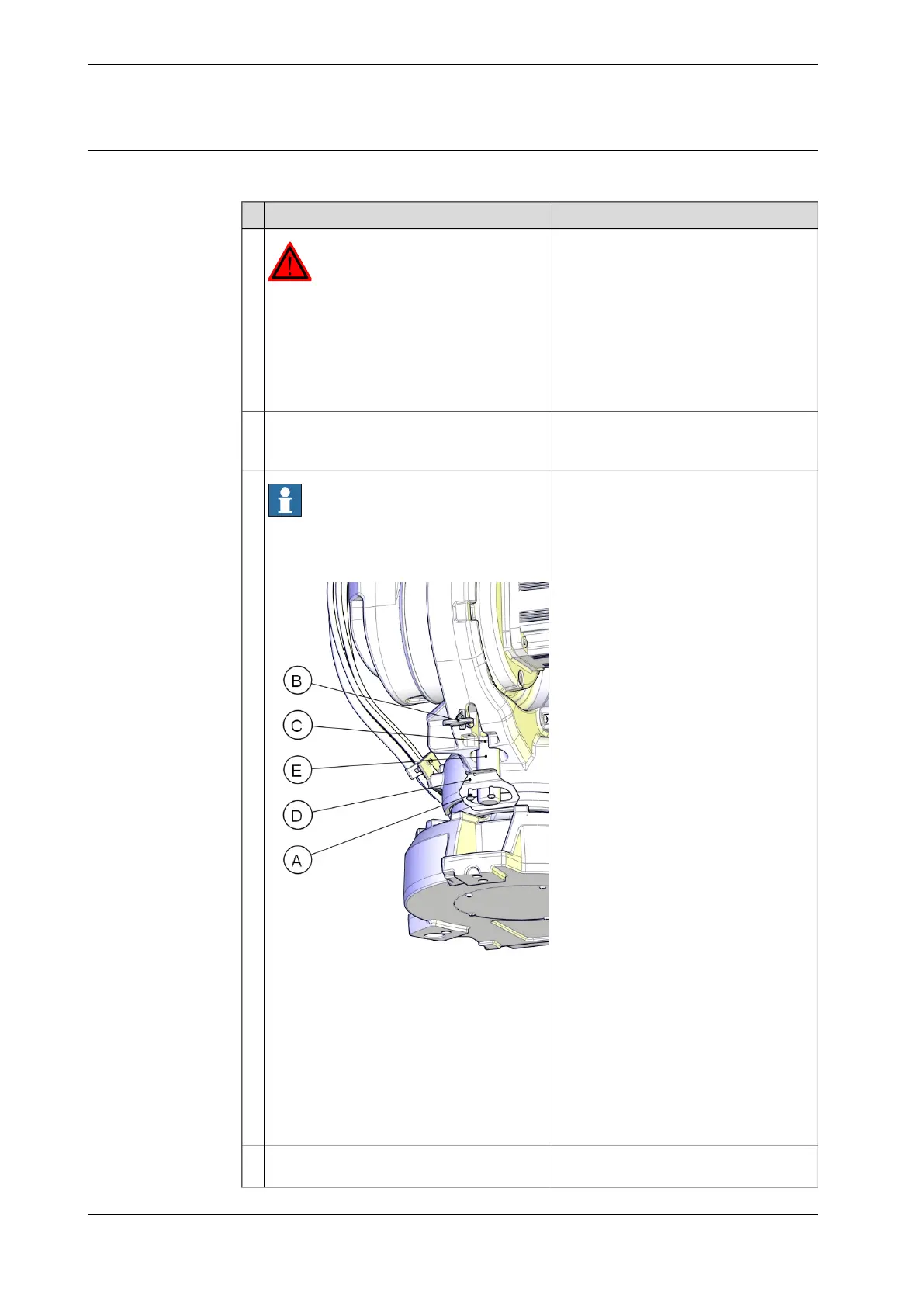
xx0800000045
Parts:
A Attachment screws
B Bracket
C O-ring (2 pcs) - Not used if bracket (D)
is installed.
D Bracket
E Stop pin
3
Check that the mechanical stop pin is prop-
erly attached.
4
Continues on next page
138 Product manual - IRB 2600
3HAC035504-001 Revision: Q
© Copyright 2009-2018 ABB. All rights reserved.
3 Maintenance
3.3.8 Inspecting the mechanical stop pin, axis 1
Continued

 Loading...
Loading...





