4.7 Motors
4.7.1 Removing motors
Introduction
This procedure describes how to remove motors on all axes of the robot.
Note
For IRB 2600ID this section describes motors axes 1, 2, 3 and 4. Motors axes 5
and 6 are described in sections:
• Motor axis 5, section Replacing motor axis 5 - IRB 2600ID on page 329
• Motor axis 6, section Replacing motor axis 6 and wrist unit - IRB 2600ID on
page 341.
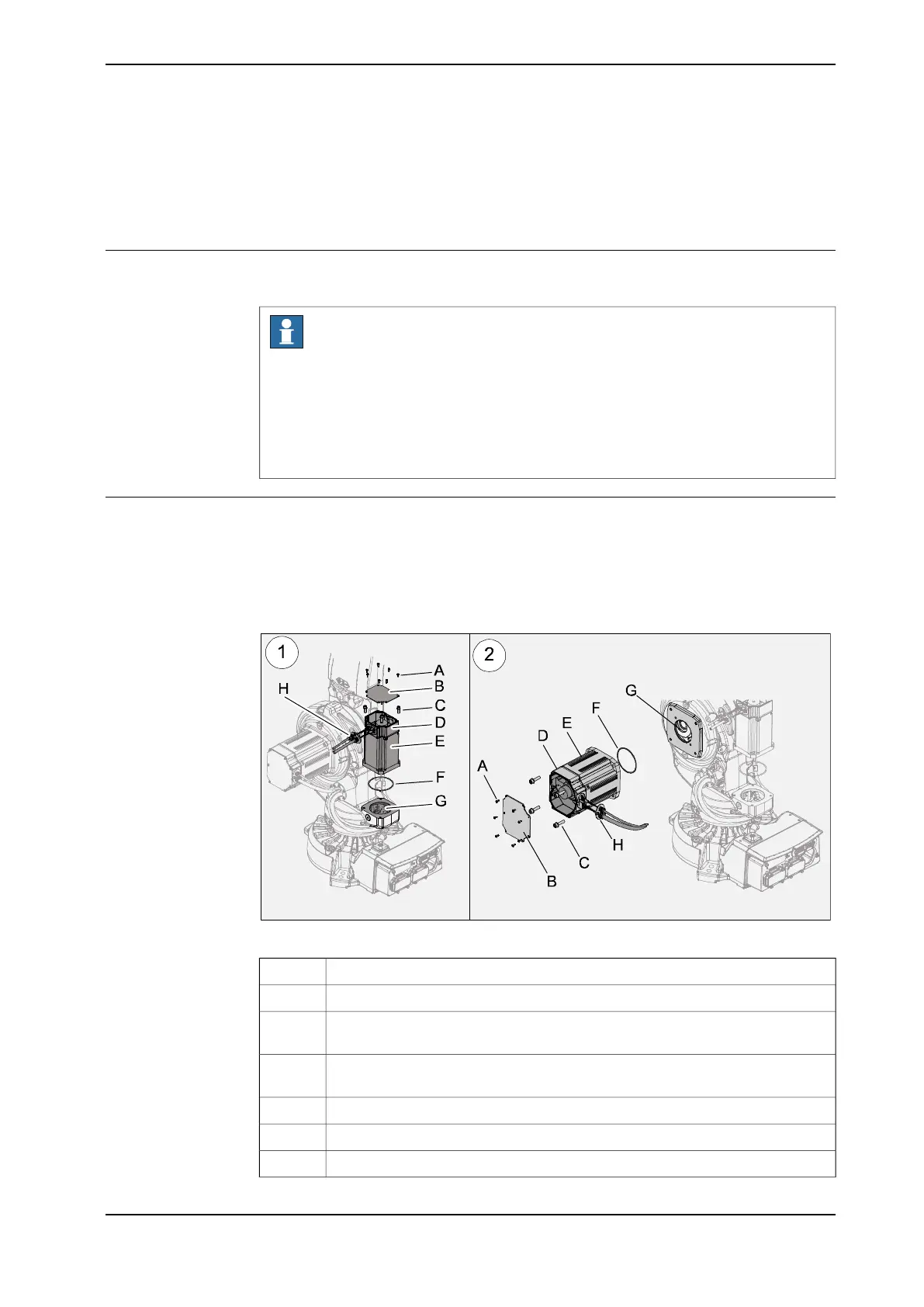
Location of axis-1 and axis-2 motors
The axis-1 and axis-2 motors are located as shown in the figure.
Motors:
(1) = Axis-1 motor
(2) = Axis-2 motor
xx0900000302
Attachment screws M5x16, quality Steel 8-A2F (7 pcs)A
Motor coverB
Attachment screws, axis-1 motor (4 pcs) + washers. See Tightening torques and
attachment screws on page 320
C
Attachment screws, axis-2 motor (4 pcs) + washers. See Tightening torques and
attachment screws on page 320
C
Connection boxD
Axis-1 motorE
Axis-2 motorE
Continues on next page
Product manual - IRB 2600 301
3HAC035504-001 Revision: Q
© Copyright 2009-2018 ABB. All rights reserved.
4 Repair
4.7.1 Removing motors

 Loading...
Loading...





