Removing the cable harness
Use this procedure to remove the cable harness.
InformationAction
Decide which calibration routine to use, and
take actions accordingly prior to beginning
the repair procedure.
1
Move the robot to synchronization position.2
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
3
Remove all extra equipment fitted on the
upper arm and wrist.
4
Secure the upper arm with roundslings in
an overhead crane or similar.
5
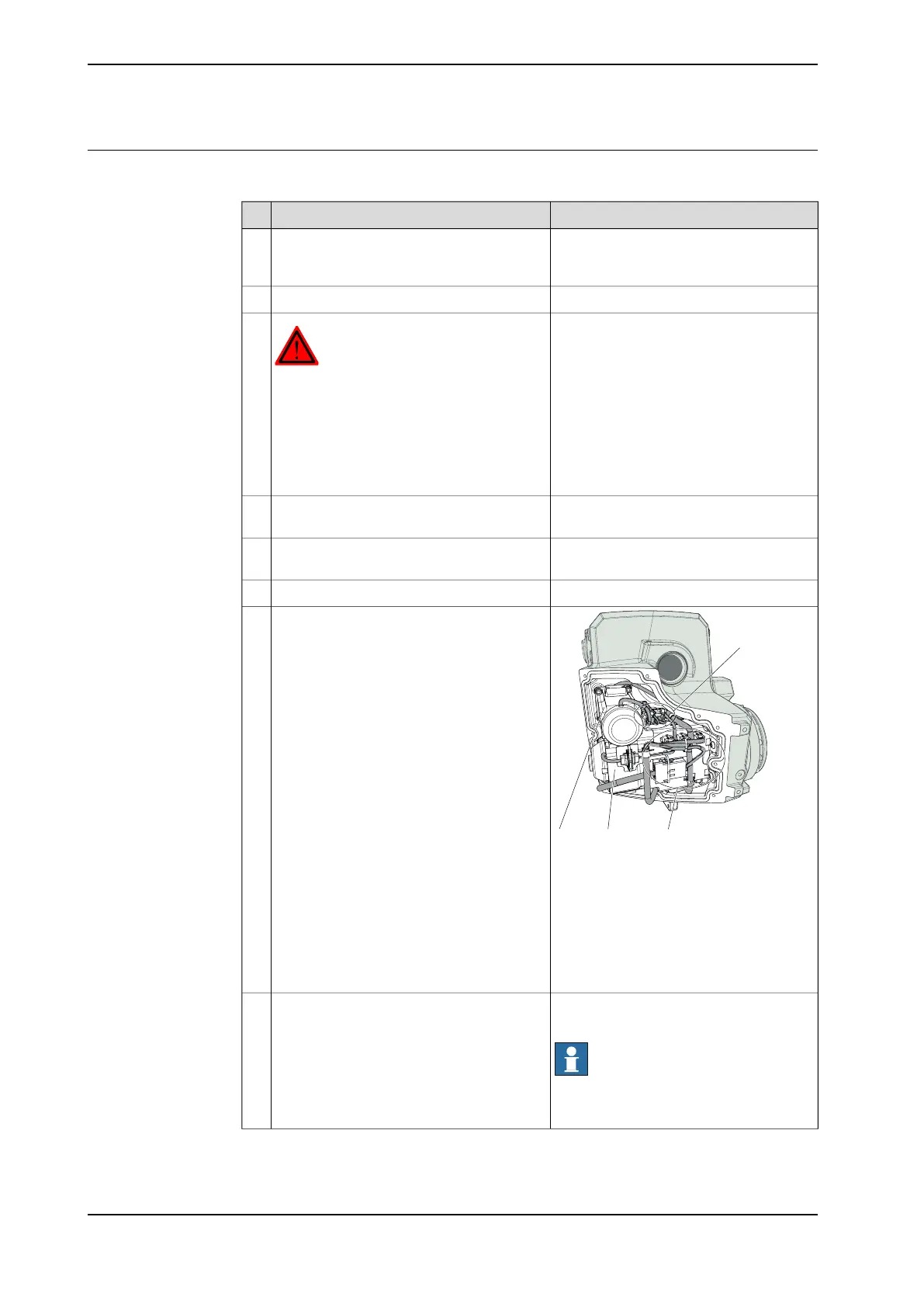
Remove the cover on the arm house.6
xx1000000991
Disconnect the cables to motors axes 3, 4,
5 and 6.
7
Parts:
A Motor axis 4
B Motor axis 3
C MP connectors axes 3, 4, 5 and 6
(see markings for axis)
D FP connectors axes 3, 4, 5 and 6
(see markings for axis)
See section
• Removing the wrist unit on page 343
Note
No need to remove the axis-6 motor. Only
the motor cables need to be disconnected.
Remove the wrist.
(This is done in order to be able to discon-
nect the motor cables of motor axis 6)
8
Continues on next page
224 Product manual - IRB 2600
3HAC035504-001 Revision: Q
© Copyright 2009-2018 ABB. All rights reserved.
4 Repair
4.3.3 Replacing the cable harness in the upper arm - IRB 2600ID
Continued

 Loading...
Loading...





