NoteAction
xx0800000336
Move the robot to the position shown in the
figure.
3
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot
working area.
4
xx0800000335
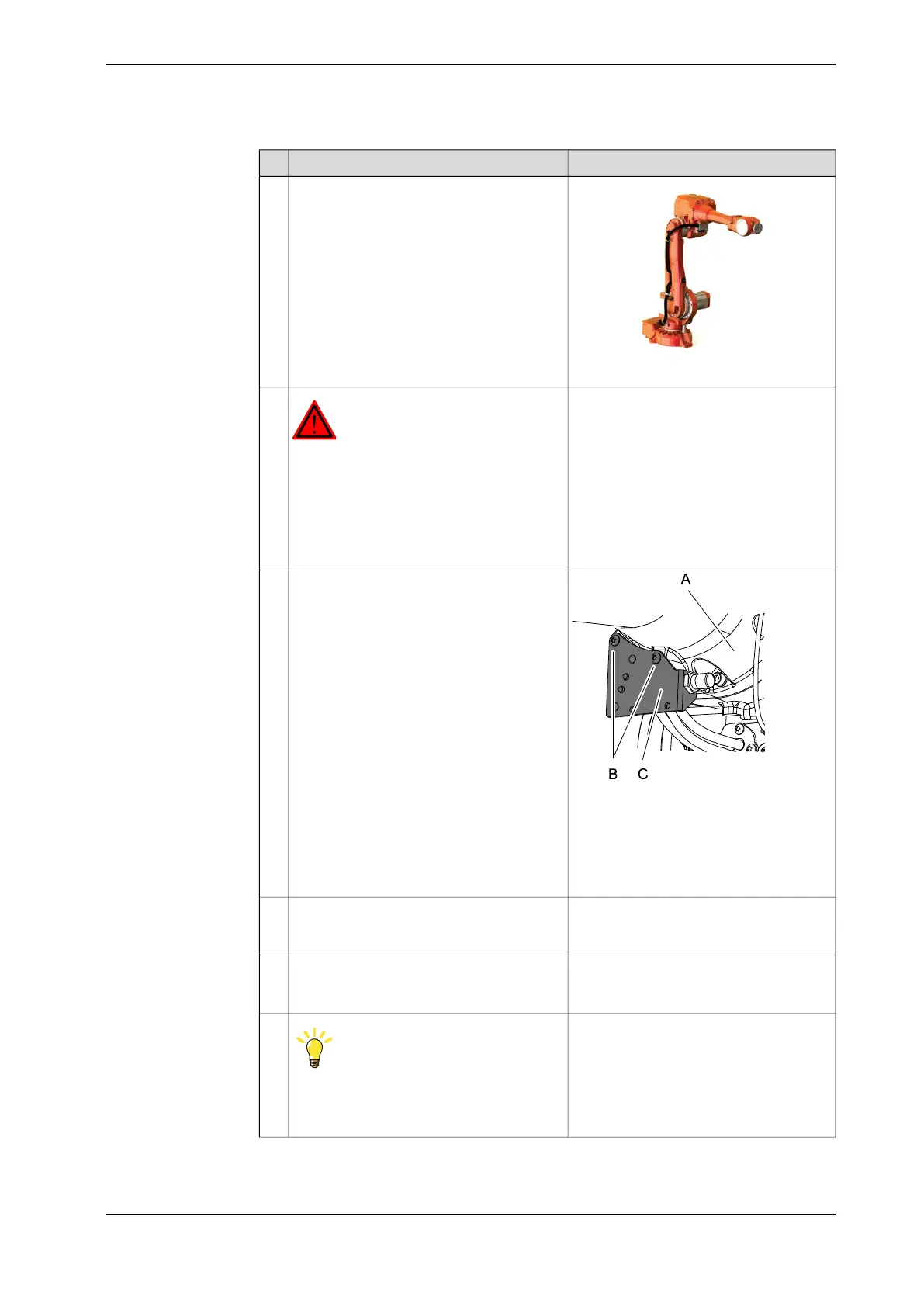
Remove the bracket securing the cable
package to the tubular shaft unit by remov-
ing its attachment screws.
5
Parts:
• A: Tubular shaft unit
• B: Attachment screws M6x16 qual-
ity 8.8-A2F (2 pcs)
• C: Bracket
Place the cable package in a way that it will
not be damaged in the continued removal
procedure.
6
How to remove motors is described in
section:
• Removing motors on page 301
Remove motors axes 4, 5 and 6.7
How to remove the wrist unit is detailed
in section:
• Removal of wrist unit on page 263
Tip
If only the tubular shaft unit shall be re-
placed, it is a good idea to remove the wrist
unit at this stage.
8
Continues on next page
Product manual - IRB 2600 257
3HAC035504-001 Revision: Q
© Copyright 2009-2018 ABB. All rights reserved.
4 Repair
4.4.2 Replacing complete tubular shaft unit
Continued

 Loading...
Loading...





