Name Values (Range) Unit Step Default Description
RFltRevPG 1.00 - 9000.00 ohm/l 0.01 100.00 Fault resistance reach, Ph-G, reverse
IMinPUPP 5 - 500 %IB 1 10 Minimum pickup delta current (2 x current of
lagging phase) for Phase-to-phase loops
IMinPUPG 5 - 500 %IB 1 5 Minimum pickup phase current for Phase-to-
ground loops
Table 77: FRPSPDIS (21) Group settings (advanced)
Name Values (Range) Unit Step Default Description
TimerPP Disabled
Enabled
- - Disabled Operation mode Disable/Enable of Zone
timer, Ph-Ph
tPP 0.000 - 60.000 s 0.001 3.000 Time delay to trip, Ph-Ph
TimerPE Disabled
Enabled
- - Disabled Operation mode Disable/ Enable of Zone
timer, Ph-G
tPG 0.000 - 60.000 s 0.001 3.000 Time delay to trip, Ph-E
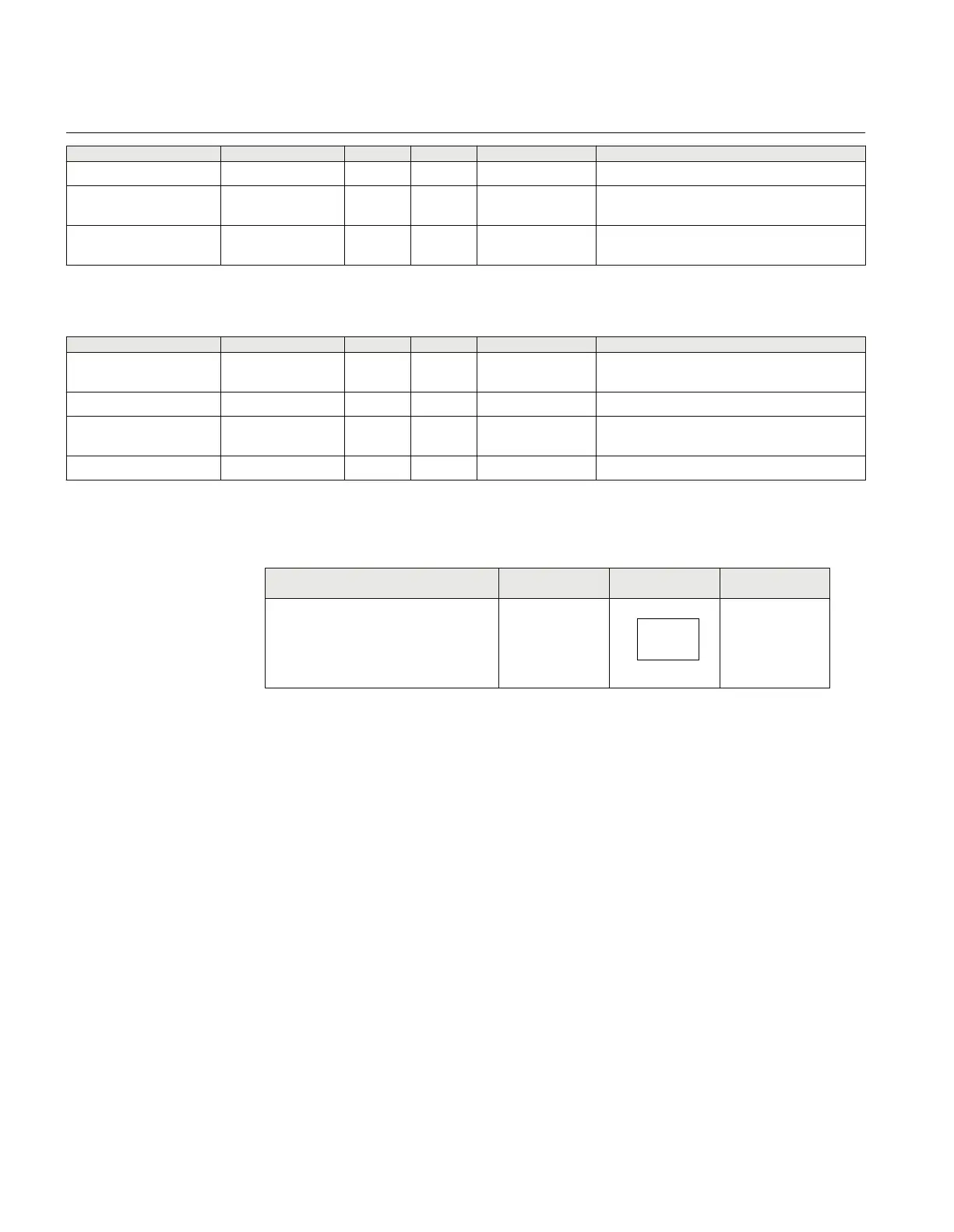
3.6.11 Power swing detection ZMRPSB (68)
Function description IEC 61850
identification
IEC 60617
identification
ANSI/IEEE C37.2
device number
Power swing detection ZMRPSB
SYMBOL-EE V1 EN
68
3.6.11.1 Application
General
Various changes in power system may cause oscillations of rotating units. The most
typical reasons for these oscillations are big changes in load or changes in power
system configuration caused by different faults and their clearance. As the rotating
masses strive to find a stable operate condition, they oscillate with damped oscillations
until they reach the final stability.
The extent of the oscillations depends on the extent of the disturbances and on the
natural stability of the system.
The oscillation rate depends also on the inertia of the system and on the total system
impedance between different generating units. These oscillations cause changes in
phase and amplitude of the voltage difference between the oscillating generating units
Section 3 1MRK504116-UUS C
IED application
356
Application manual

 Loading...
Loading...














