Control System B-7MN1902
B.2.2 Speed controller
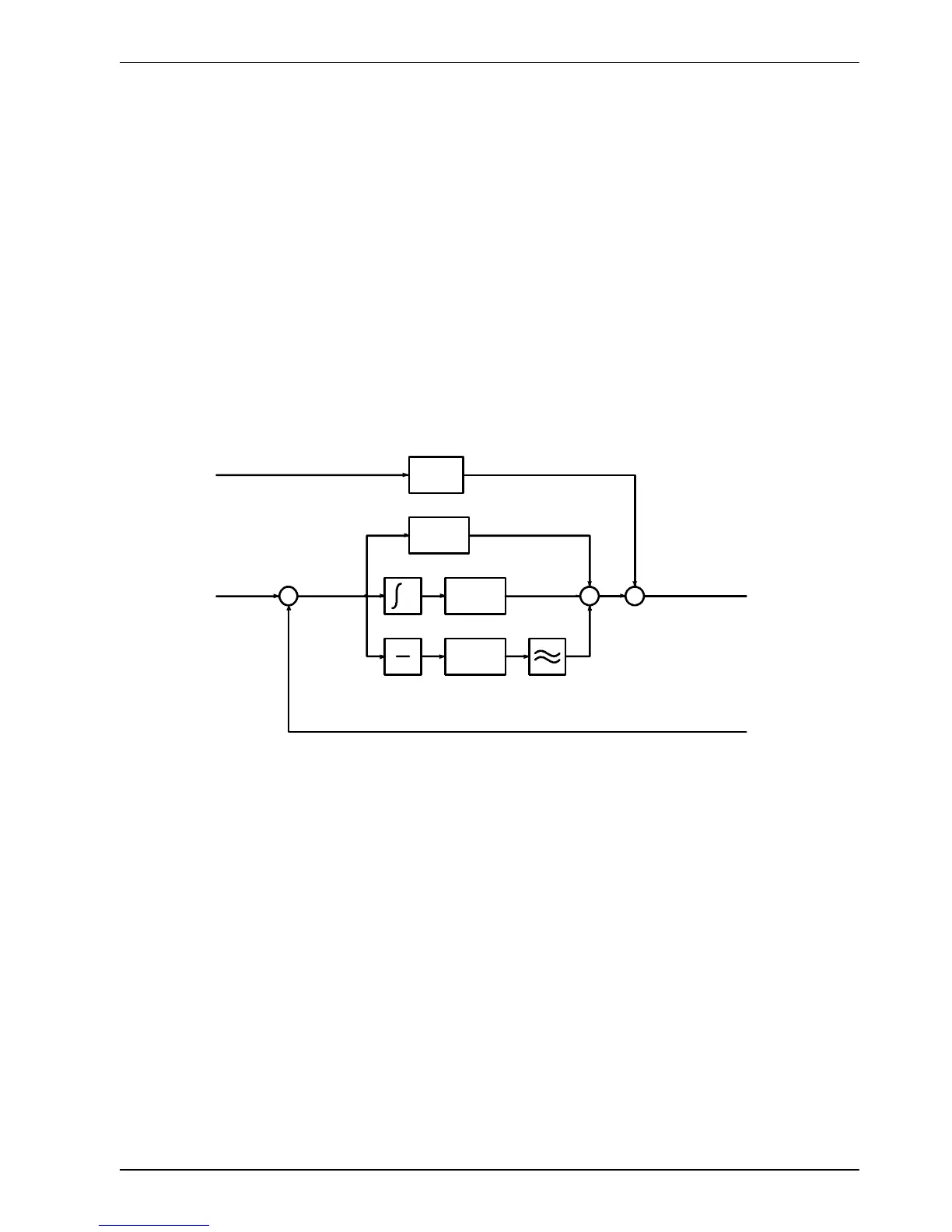
The speed controller , shown in Figure 48, is also a PID controller. Gains are set using the Mint
keywords KVPROP, KVINT and KVDERIV. The speed is compared with the measured speed
and the error is fed into the PID control calculation. The result forms the torque demand for
the torque controller. To improve the performance of the derivative term, an optional filter is
included. The time constant of this filter can be set using keyword KVDERIVTCONST.
By default the filter is turned off, with KVDERIVTCONST set to zero.
When the FlexDrive
II
is set to positioning mode (CONFIG is _cfSERVO), the profiler
acceleration is fed forward by gain KACCEL to give a contribution to the final torque demand.
The speed control calculation is performed every 250µs. As with the position controller, the
gain values KVPROP, KVINT, KVDERIV and KACCEL must be tuned for each application.
This can either be performed automatically within the Commissioning Wizard, or manually
using the Fine-tuning tool of WorkBench v5.
KACCEL
KVPROP
KVINT
KVDERIV
dt
d
dt
Velocity
error
Proportional gain term
Integral gain term
Derivative gain term
Measured speed
(VEL)
Torque demand
Acceleration feedforward term
Profiler acceleration
Speed demand
+
+
+
+
+
+
-
(KVDERIVTCONST)
Filter
(Position control)
Figure 48 - S peed control system
 Loading...
Loading...

