B-8 Control System MN1902
B.2.3 Torque controller and feedback
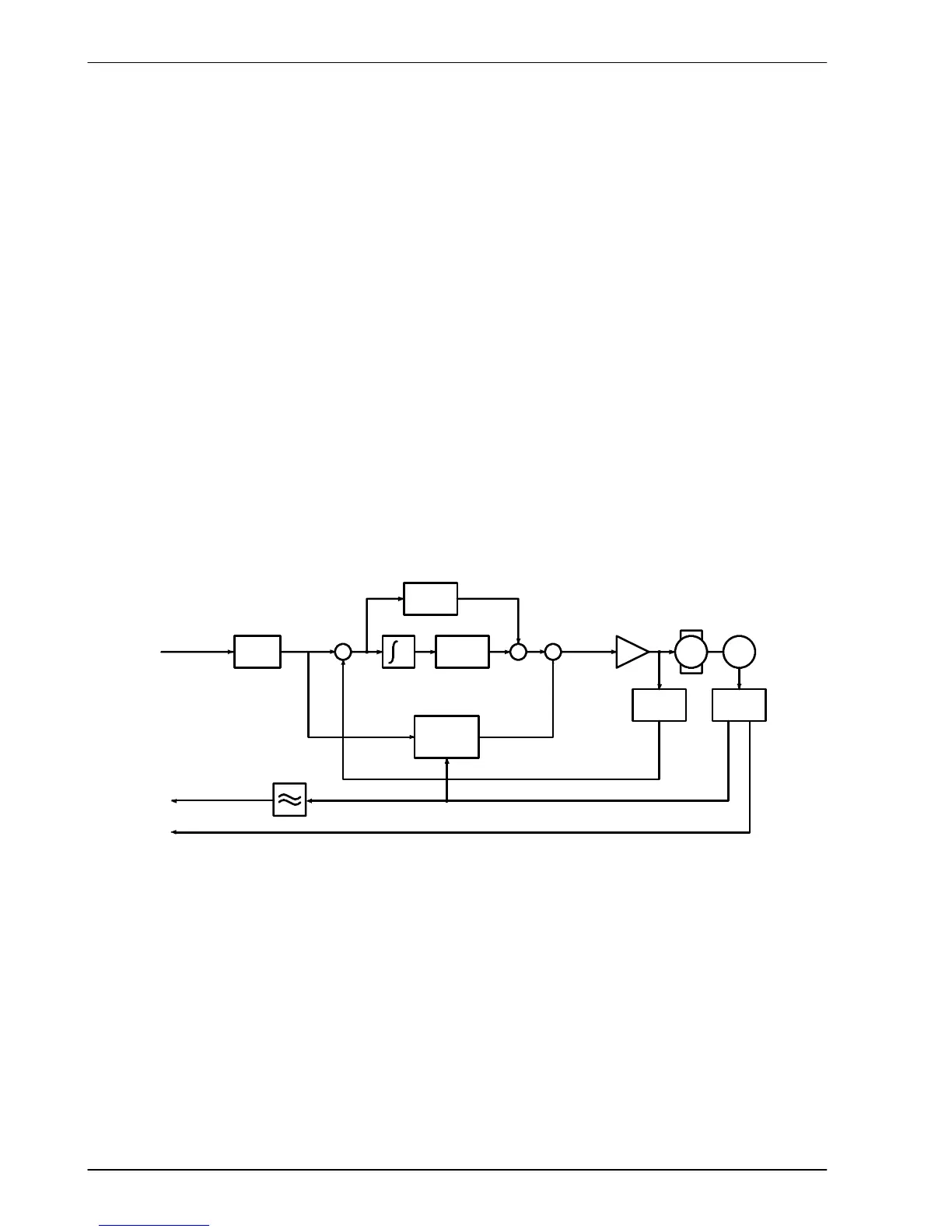
The torque controller, shown in Figure 49, is a PI controller. Gains are set using the Mint
keywords KIPROP and KIINT. The torque demand is scaled into a current demand. This is
compared with the measured current, obtained from the current sensors, and the error is fed
into the PI control calculation. The resulting value forms the PWM signal that is fed through
the power stage into the motor windings. The gain values KIPROP and KINT must be tuned
for a specific motor . This is performed automatically by the Commissioning Wizard.
Although the PI control alone can achieve adequate current tracking if tuned correctly,
performance is increased using a feedforward voltage model. This model compensates for the
voltage drop due to stator resistance (set using the MOTORRS keyword) and stator leakage
inductance (set using the MOTORLS keyword). It also compensates for the back EMF of the
motor, with the voltage constant of the motor being set using the MOTORFLUX keyword.
Values for MOTORRS, MOTORLS and MOTORFLUX are set automatically by the Commissioning
Wizard. The torque control calculation is performed every 125µs.
The feedback device (e.g. an encoder or resolver) is used to determine motor position and
speed. Motor speed can be filtered to reduce measurement noise if necessary . The time
constant of this filter is specified using the keyword KVTIME. By default the filter is turned off
(KVTIME = 0). Note that introducing a filter on measured speed tends to reduce the stability
of the speed controller. This can make the tuning of the speed controller gains difficult if large
values of KVTIME are used.
KIPROP
KIINT
dt
Proportional gain termB-8s
Integral gain term
Torque demand
+
+
+
+
+
-
PWM v alue
(EFFORT)
Current
demand
Voltage
model
MOTORLS
MOTORFLUX
Internal
scaling
Current
sensors
Feedback
device
(e.g. encoder,
resolver)
Motor
Measured current
Feedback
interface
Measured speed (VEL)
Measured position (POS)
Filter
(KVTIME)
Power
stage
MOTORRS
Figure 49 - Torque control system
 Loading...
Loading...

