84
Type 8692, 8693
english
Start-up, operation
position controller Type 8692
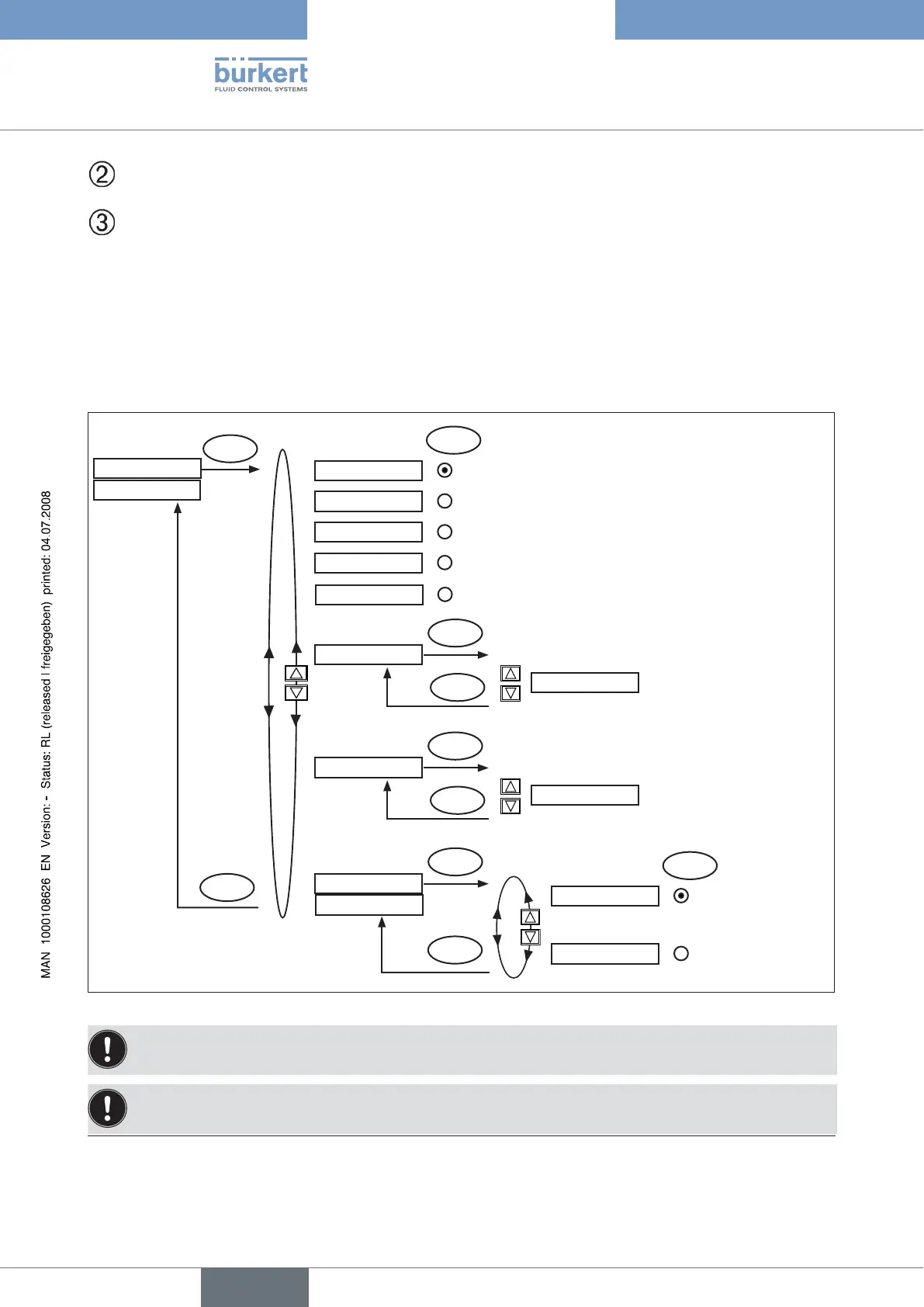
OUT BIN1 - Configuration of the binary output 1
OUT BIN2 - Configuration of the binary output 2
The following description is valid for both binary outputs OUT BIN 1 and OUT BIN 2, as the operation in the menu is identical.
The binary outputs 1 and 2 can be used for one of the following outputs:
Alarm output for excessively large control deviations of the position controller•
for the output of the current position with respect to a specified limit position (> or <)•
for the output: actuator in safety position•
for the output: sensor break•
for the output: operating state (AUTOMATIC / MANUAL)•
SELEC
OUT DEV.X
EXIT
Lim. DEV.X 1.0%
Selection: Alarm output for excessively large control
deviation of the position controller
OUT BIN 1
ENTER
OUT POS
Output: current position with respect to a specified limit
position
OUT Safepos
Output: actuator in safety position
OUT ERRSP/CMD
Output: sensor break
INPUT
+
-
Lim. DEV.X: 1.0
OK
*
Input the limit value for the
permitted control deviation
Adjustment range: 1 ... 50 %**
Lim. POS 0%
INPUT
+
-
Lim. POS: 0
OK
*
Input the limit position
Adjustment range: 0 ... 100 %
OUT BIN 1 type
ENTER
SELEC
normally opened
Selection of
switching signal
EXIT
normally closed
OUT BIN 2
OUT BIN 2 type
OUT remote
Output: operating state MANUAL / AUTOMATIC
Fig. 35: Operating structure OUTPUT-BIN1
Normally closed output, in switched state low (≅ 0 V)
Normally opened output, in switched state high (≅ 24 V)
Changed values are not transferred into the memory (EEPROM) until the main menu (MAIN) is left.
* If the sub-menu is left by pressing the selection key on the left (ESC), the value remains unchanged.
** The permitted control deviation Lim DEV.X XX must not be less than the dead band.