CDE360 Vector Control AC Drive Chapter 5 Parameter List Table
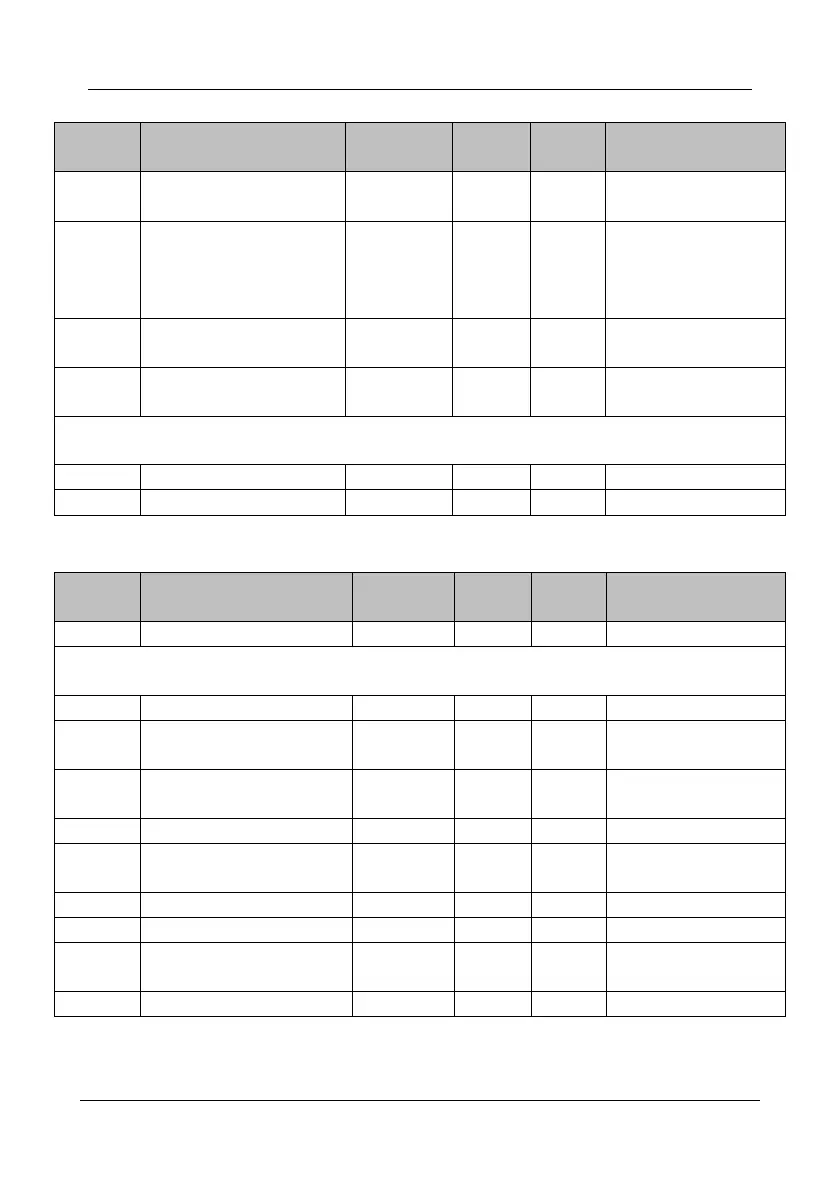
L1 Point-point Communication
Master and slave selection
Send data selection of
master
0: Torque reference
1: Running frequency
2: Setting frequency
3: Feedback frequency
Point-point communication
enable
Usage of data received by
slave
Unit's digit: Data usage of slave
1: as frequency reference
Ten's digit: Whether to follow the master commands 0: No 1: Yes
Zero offset of received data
L2 Encoder Setting
0: ABZ incremental Encoder
1: UVW incremental Encoder
2: Rotational resolver
3: Sine and cosine Encoder
4: Wire-saving UVW Encoder
Encoder pulse per revolution
A/B phase sequence of
ABC incremental Encoder
Z pulse initial angle of ABZ
incremental Encoder
Encoder installation angle
UVW phase sequence of
UVW Encoder
Encoder wire-break fault
detection time