CG Drives & Automation,01-5326-01r5 Functional Description 101
Communication information
Encoder Speed [22D]
Only visible if the Encoder option board is installed. This
parameter shows the measured motor speed. To check if the
encoder is correctly installed, set Encoder Feedback [22B] to
Off, run the AC drive at any speed and compare with the
value in this menu. The value in this menu [22D] should be
about the same as the motor speed [230]. If you get the
wrong sign for the value, swap encoder input A and B.
Communication information
Encoder Pulse counter [22F]
Only visible if the Encoder option is installed. Added menu/
parameter for accumulated QEP (Quadrature Encoder
Pulse) encoder pulses. Can be preset to any value within bus
format used (Int = 2 byte, Long = 4 byte).
Communication information
Encoder fault and speed monitoring
[22G]
Parameters for encoder fault monitoring and speed
supervision by use of the encoder feedback for detecting
speed deviation compared to internal speed reference signal.
Similar speed deviation functionality is also available in the
Crane option, with parameters for speed bandwidth and
delay time.
Encoder fault trip conditions:
1. No encoder board detected after power up and AC
drive is setup to use encoder.
2. Lost communication to encoder board for more
than 2 seconds.
3. If no pulses detected for set delay time [22G1] and
drive in Torque Limit (TL) or Current Limit (CL).
Encoder speed deviation trip condition:
Encoder speed outside set speed deviation band [22G2] for
set delay time [22G1].
Encoder fault delay time [22G1]
Define the encoder fault and speed deviation delay time.
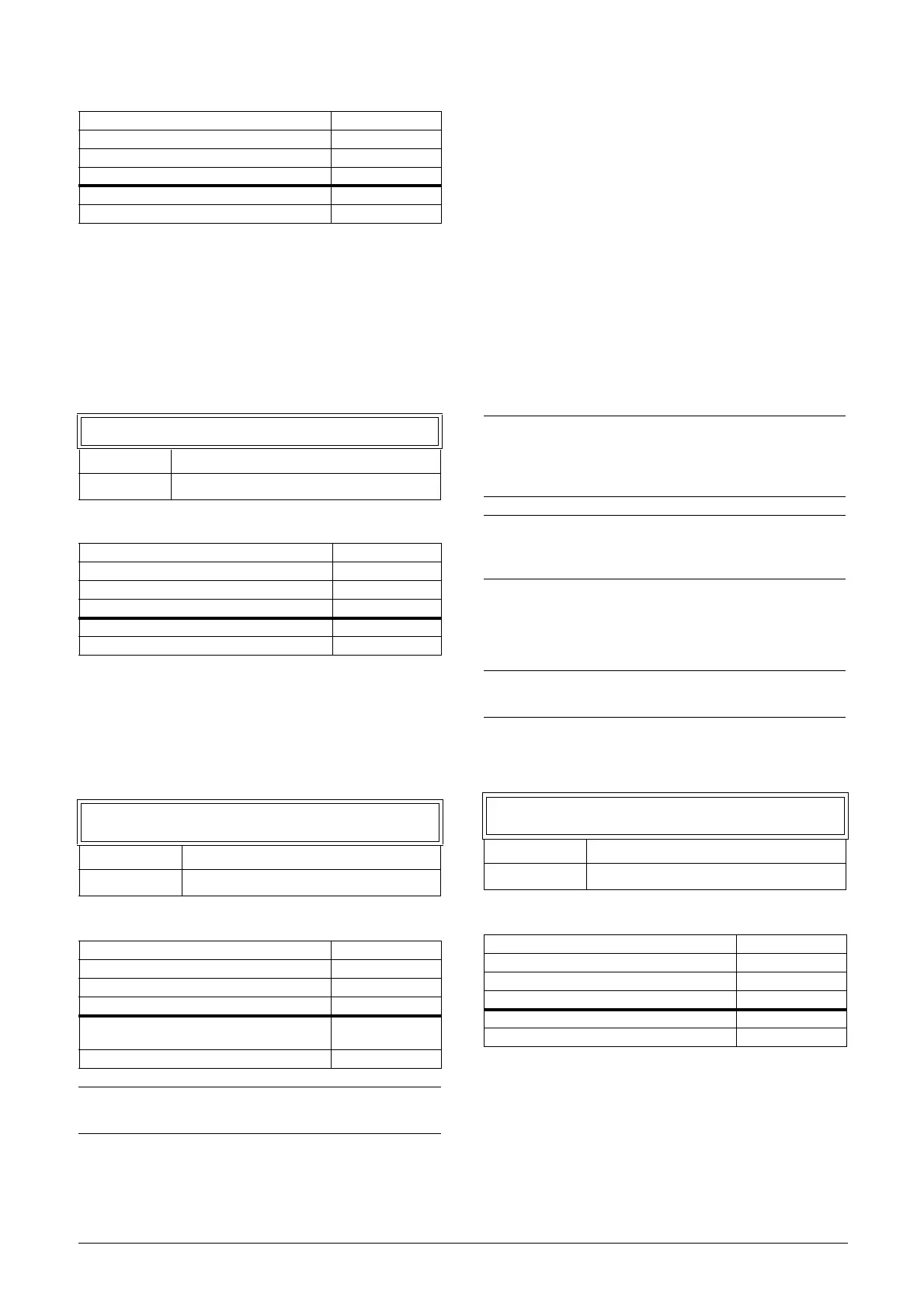
Communication information
Modbus Instance no/DeviceNet no: 43052
Profibus slot/index 168/211
EtherCAT and CANopen index (hex) 4bec
Profinet IO index 19436
Fieldbus format Long, 1=1 pulse
Modbus format EInt
22D Enc Speed
Unit: rpm
Resolution: speed measured via the encoder
Modbus Instance no/DeviceNet no: 42911
Profibus slot/index 168/70
EtherCAT and CANopen index (hex) 4b5f
Profinet IO index 19295
Fieldbus format Int, 1=1 rpm
Modbus format Int
22F Enc Puls Ctr
Default: 0
Resolution 1
Modbus Instance no/DeviceNet no: 42912
Profibus slot/index 168/71
EtherCAT and CANopen index (hex) 4b60
Profinet IO index 19296
Fieldbus format
Long, 1=1 quad
encoder pulse
Modbus format Int
Note: For a 1024 pulse encoder [22F] will count
1024 * 4= 4096 pulses per turn.
Note: If encoder signals are missing or encoder cable
disconnected, the measured speed will then be 0 rpm
and the AC drive will run with Torque Limit (TL) at very
low speed.
Note: Other likely scenarios when encoder signals are
lost during operation are tripped drive due to
“Overcurrent Fast” or “Desat”.
Note: Encoder speed deviation trip re-uses
“Deviation 2” trip message with ID = 2.
22G1 Enc F Delay
Default: Off
Range Off, 0.01 - 10.00 s where Off = 0
Modbus Instance no/DeviceNet no: 43056
Profibus slot/index 168/215
EtherCAT and CANopen index (hex) 4bf0
Profinet IO index 19440
Fieldbus format Long, 1=0.01 s
Modbus format EInt

 Loading...
Loading...