CG Drives & Automation,01-5326-01r5 Functional Description 139
11.5.6 Torques [350]
Menu with all parameters for torque settings.
Maximum Torque [351]
Sets the maximum motor torque (according to menu group
“Motor Data [220]”). This Maximum Torque operates as an
upper torque limit. A Speed Reference is always necessary to
run the motor.
Communication information
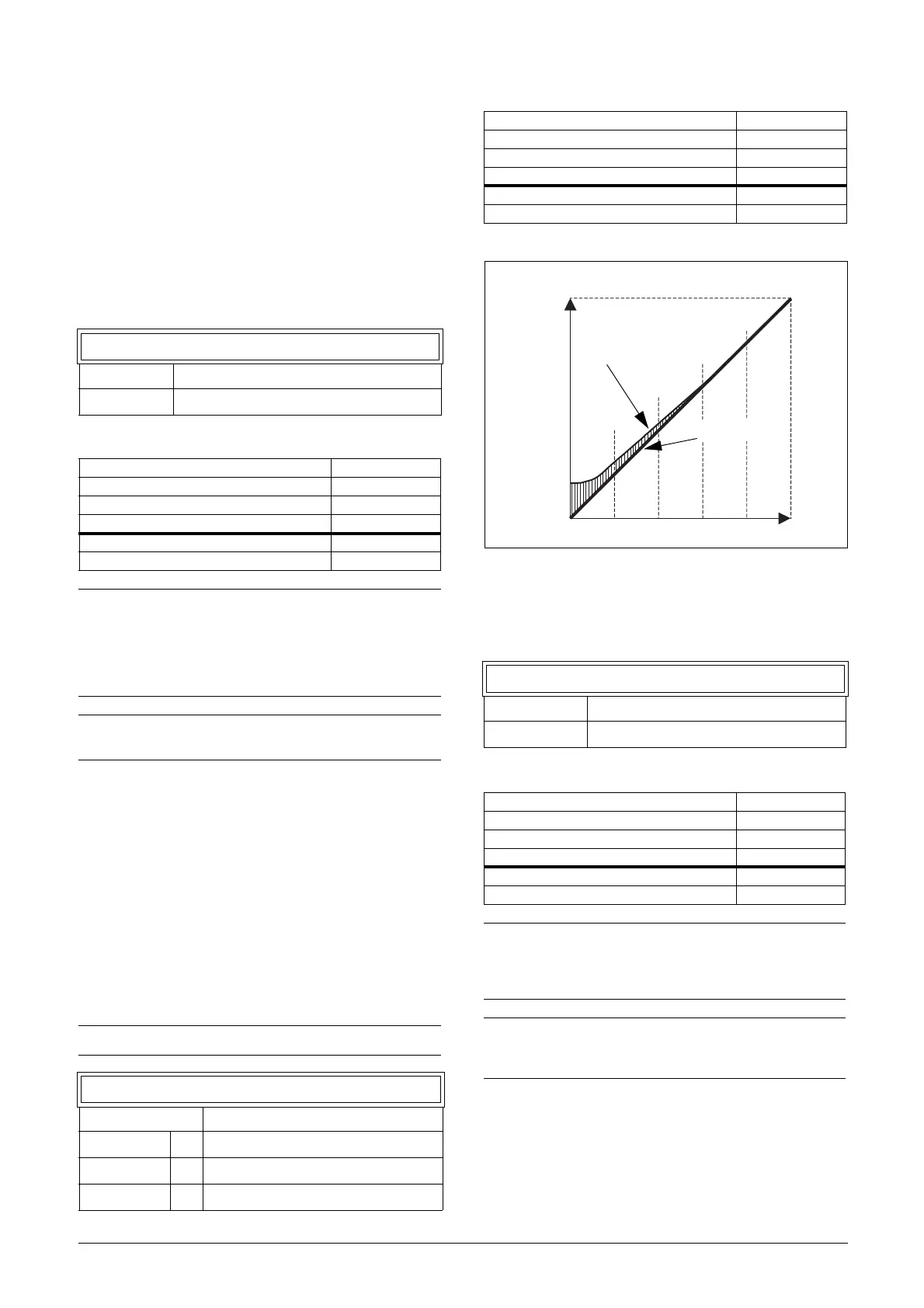
IxR Compensation [352]
This function compensates for the drop in voltage over
different resistances such as (very) long motor cables, chokes
and motor stator by increasing the output voltage at a
constant frequency. IxR Compensation is most important at
low frequencies and is used to obtain a higher starting
torque. The maximum voltage increase is 25% of the
nominal output voltage. See Fig. 108.
Selecting “Automatic” will use the optimal value according
to the internal model of motor. “User-Defined” can be
selected when the start conditions of the application do not
change and a high starting torque is always required. A fixed
IxR Compensation value can be set in the menu [353].
Communication information
Fig. 108 IxR Comp at Linear V/Hz curve
IxR Comp_user [353]
Only visible if User-Defined is selected in previous menu.
Communication information
351 Max Torque
Default: 120% calculated from the motor data
Range: 0–400%
Modbus Instance no/DeviceNet no: 43141
Profibus slot/index 169/45
EtherCAT and CANopen index (hex) 4c45
Profinet IO index 19525
Fieldbus format Long, 1=1%
Modbus format EInt
NOTE: The Max Torque parameter will limit the
maxmum output current of the AC drive following the
relation: 100% Tmot corresponds to 100% Imot.
The maximum possible setting for parameter 351 is
limited by Inom/Imot x 120%, but not higher than
400%.
NOTE: The motor temperature increases very quickly
due to extensive power losses.
NOTE: This menu is visible only in V/Hz mode.
352 IxR Comp
Default: Off
Off 0 Function disabled
Automatic 1 Automatic compensation
User Defined 2 User defined value in percent.
T
MOT
Nm()
P
MOT
kw()x9550
n
MOT
rpm()
------------------------------------------=
= 100%
Modbus Instance no/DeviceNet no: 43142
Profibus slot/index 169/46
EtherCAT and CANopen index (hex) 4c46
Profinet IO index 19526
Fieldbus format UInt
Modbus format UInt
353 IxR CompUsr
Default: 0.0%
Range: 0-25% x U
NOM
(0.1% of resolution)
Modbus Instance no/DeviceNet no: 43143
Profibus slot/index 169/47
EtherCAT and CANopen index (hex) 4c47
Profinet IO index 19527
Fieldbus format Long, 1= 0.1 %
Modbus format EInt
NOTE: A too high level of IxR Compensation could
cause motor saturation. This can cause a “Power
Fault” trip. The effect of IxR Compensation is
stronger with higher power motors.
NOTE: The motor may be overheated at low speed.
Therefore it is important that the Motor I
2
t Current
[232] is set correctly.
10 20 30 40 50
Hz
f
25
%
U
100
 Loading...
Loading...
