CG Drives & Automation,01-5326-01r5 Functional Description 143
Speed P Gain [372]
For adjusting the P gain of the internal speed controller. The
speed P gain must be manually tuned for a faster reaction to
load changes. The speed P gain can be increased until there
is audible noise from the motor and then decreased until the
noise disappears.
Communication information
Speed I Time [373]
To adjust the time of the internal speed controller see
parameter Speed PI Autotune [371].
Communication information
11.5.9 PID Process Control [380]
The PID controller is used to control an external process via
a feedback signal. The reference value can be set via analogue
input AnIn1, at the Control Panel [310] by using a Preset
Reference, or via serial communication. The feedback signal
(actual value) must be connected to an analogue input that
is set to the function Process Value.
Process PID Control [381]
This function enables the PID controller and defines the
response to a changed feedback signal.
Communication information
PID P Gain [383]
Setting the P gain for the PID controller.
Communication information
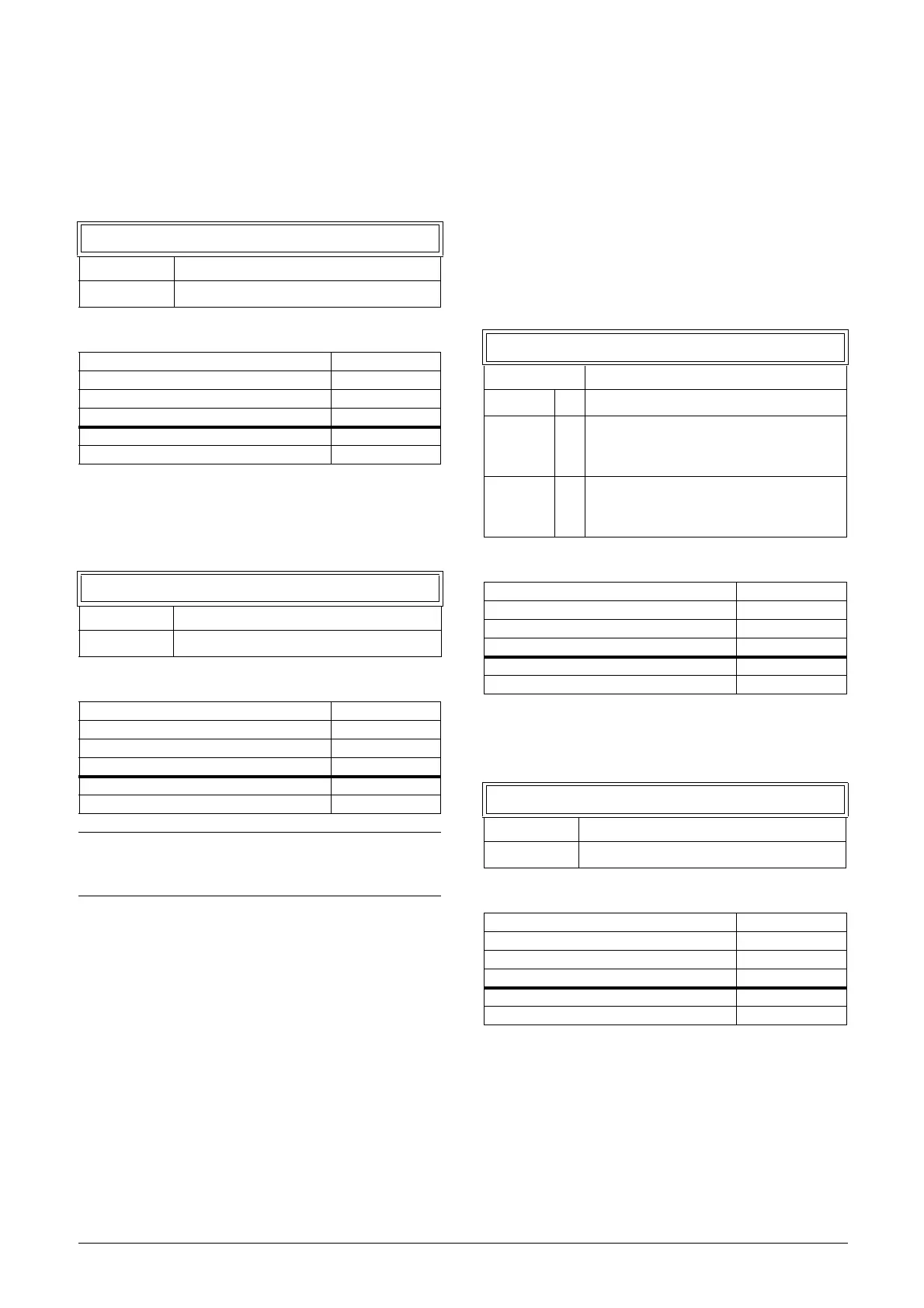
372 Spd P Gain
Default: See note
Range: 0.0–60.0
Modbus Instance no/DeviceNet no: 43152
Profibus slot/index 169/56
EtherCAT and CANopen index (hex) 4c50
Profinet IO index 19536
Fieldbus format Long, 1=0.1
Modbus format EInt
373 Spd I Time
Default: See note
Range: 0.05–100 s
Modbus Instance no/DeviceNet no: 43153
Profibus slot/index 169/57
EtherCAT and CANopen index (hex) 4c51
Profinet IO index 19537
Fieldbus format Long, 1=0.01 s
Modbus format EInt
NOTE: The default settings are calculated for a
standard 4-pole motor without load according to the
nominal power of the AC drive.
381 PID Control
Default: Off
Off 0 PID control deactivated.
On 1
The speed increases when the feedback
value decreases. PID settings according to
menus [381] to [385].
Invert 2
The speed decreases when the feedback
value decreases. PID settings according to
menus [383] to [385].
Modbus Instance no/DeviceNet no: 43154
Profibus slot/index 169/58
EtherCAT and CANopen index (hex) 4c52
Profinet IO index 19538
Fieldbus format UInt
Modbus format UInt
383 PID P Gain
Default: 1.0
Range: 0.0–30.0
Modbus Instance no/DeviceNet no: 43156
Profibus slot/index 169/60
EtherCAT and CANopen index (hex) 4c54
Profinet IO index 19540
Fieldbus format Long, 1=0.1
Modbus format EInt

 Loading...
Loading...