Communication Protocol and Networking Mode
E10
8
8
8
8
8
8
8
8
8
8
!
Servo of other brand
Expansion module(up to7)
MagicWorks PLC
CANopen configura tion
1 CAN_H
2 CAN_L
3 Shor t-connect 3 and 4 when
matching with te rminal resistance
4 Ground
PPI communicati on
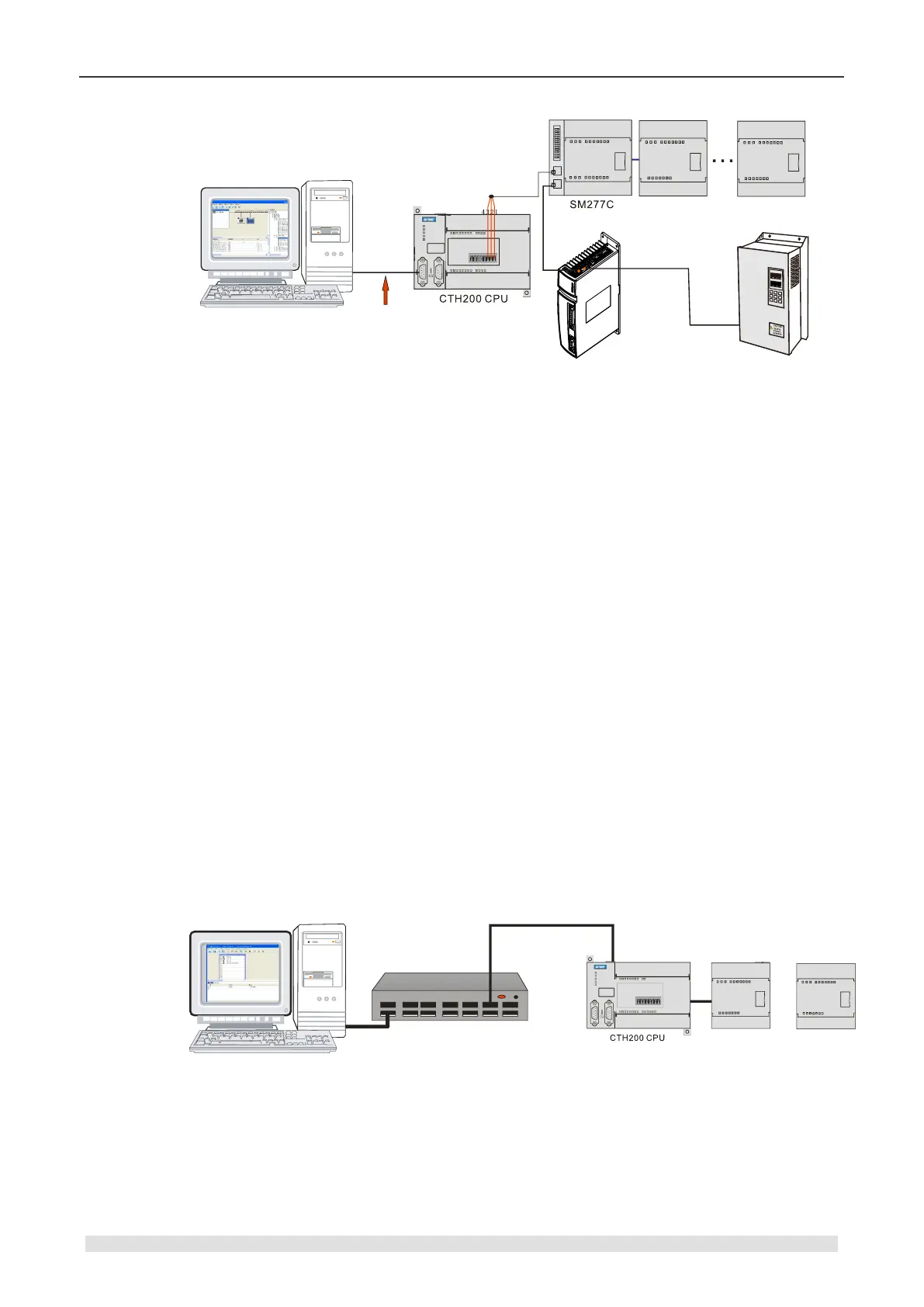
Figure 5-6 CANopen communication framework
As shown in the above figure, CTH200 PLC connects with SM277 CANopen module and its
expansion modules via CAN-01 expansion board, thus to control the Servo Drives.
Note: For more details about related terminals and wiring on the expansion board, please refer to
chapter 4.10.2 CAN Expansion Board Specifications.
5.5 Ethernet Communication
CTH200 series PLC support various ways of communication, from Ethernet to Modbus TCP and
UDP/PPI to telecommunications, monitor and data exchange using Mico.
CTH200 series PLC, which could communicate with other CPU modules, HMI or PC, support
Modbus/TCP, UDP/PPI protocols for local Ethernet communication as well as remote program
and monitor by Mico, a cloud platform where you can real-time view the status of remote devices.
Refer to chapter 6.2 Modbus TCP Communication and 6.3 UDP_PPI Communication for the
examples. Refer to Mico Remote Monitor Manual and How to Use Mico for Program and Data
Monitor on Remote PLC for details on remote program and data monitor.
Download address of manuals: http://www.co-trust.com/Download/index.html
The typical network architecture of CTH200 shows as below:
LINK/ACT
LAN
RMC
RUN
SF/DIAG
STOP
Q0 Q1
.0 .1 .2 .3 .4 .5 .6 .7 . 0 .1
RS4 85
PORTO
PC with MagicWorks PLC
Switch
Expansion module(up to 7)
Table 5-7 Ethernet communication framework
5.6 Profibus-DP Communication