Technical Specifications
DO commands executing would be delayed a while during communication transfer; if
there is only one SM253 motion control module attach after the CPU, the delay time for
DO from enable to execute is about 780μs; if there are 5 motion control modules, the
delay time would be 930μs.
SM253 modules are used for motion control, with 2 independent HSC MC253_HSC0 and
MC253_HSC1 (200KHZ for single/dual phases); 2 channels of independent 200KHz HSP output
which support instructions like MC253_PTP/SPEED_CTL/PWM in the motion_ctrl_module_lib.
Refer to the Appendix J SM253 Motion Control Library for more details about the motion control
library.
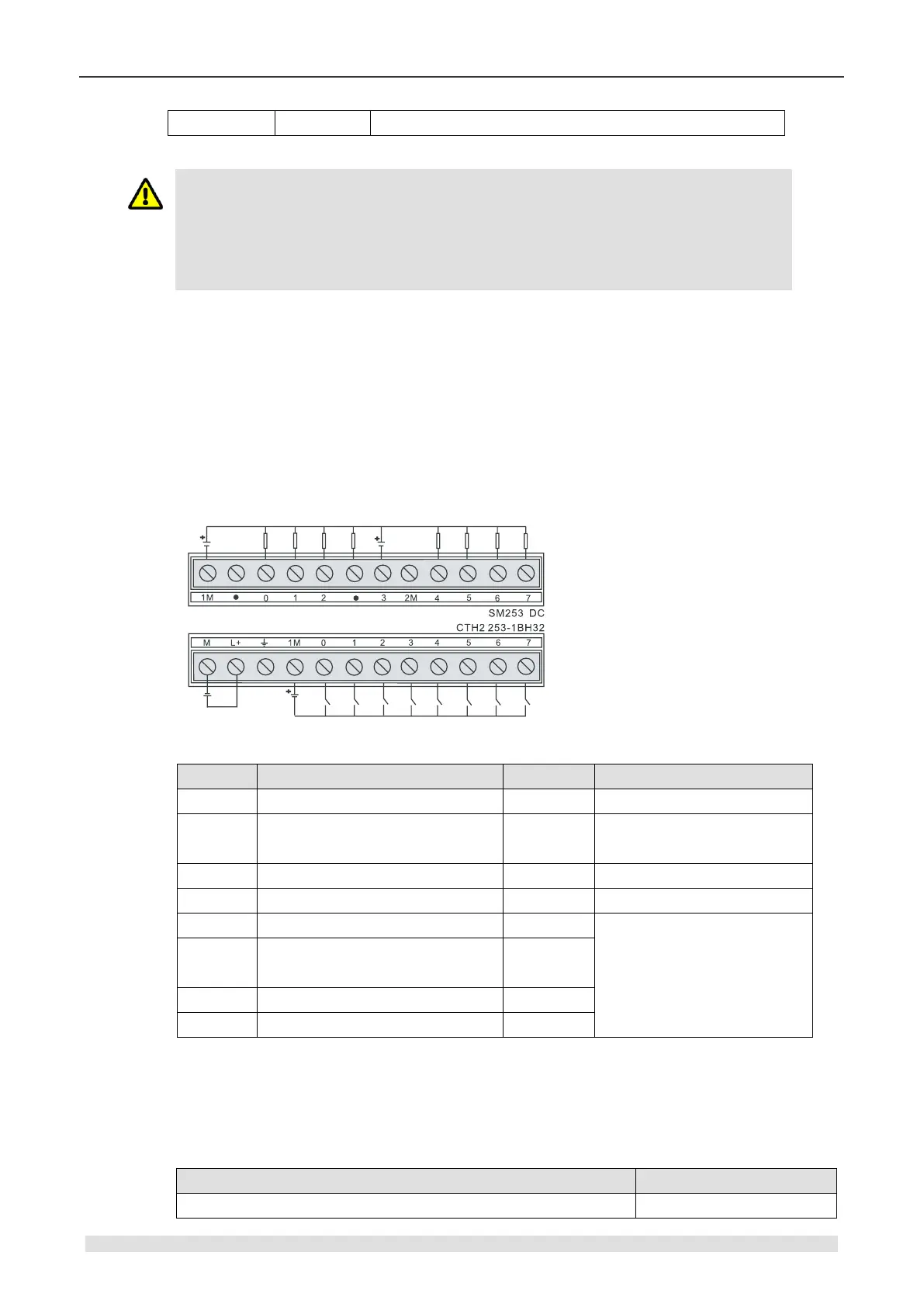
Wiring Diagrams
SM253 position control module (CTH2 253-1BH32)
Table 4-9-2 I/O definition
Pulse input for MC253_HSC0
External direction signal for
MC253_HSC0
Direction signal for axis 0
Reset signal for MC253_HSC0
Emergency stop for motion axis 0
Direction signal for axis 1
Pulse input for MC253_HSC1
External direction signal for
MC253_HSC1
Reset signal for MC253_HSC1
Emergency stop for motion axis 1
4.10 BD Expansion Board Specifications and Installation
Table 4-10-1 Order No. of BD expansion board
EBH AMS-03 Analog I/O Expansion Board, 2*12bits voltage