Appendix
② Function: configure motor direction
Execute one time on first scan cycle of CPU power on
③ Parameter
Configure effective level when
the direction signal is positive.
DIR=1, set motor forward when
corresponding direction axis
output “1”
DIR=0, set motor reverse when
corresponding direction axis
output “0”
Default: 1,
motor forward
when direction
axis output
Set axis number(2 axes for each
EM253 module, axis number
range decided by motion control
modules number)
Communication status sign bit
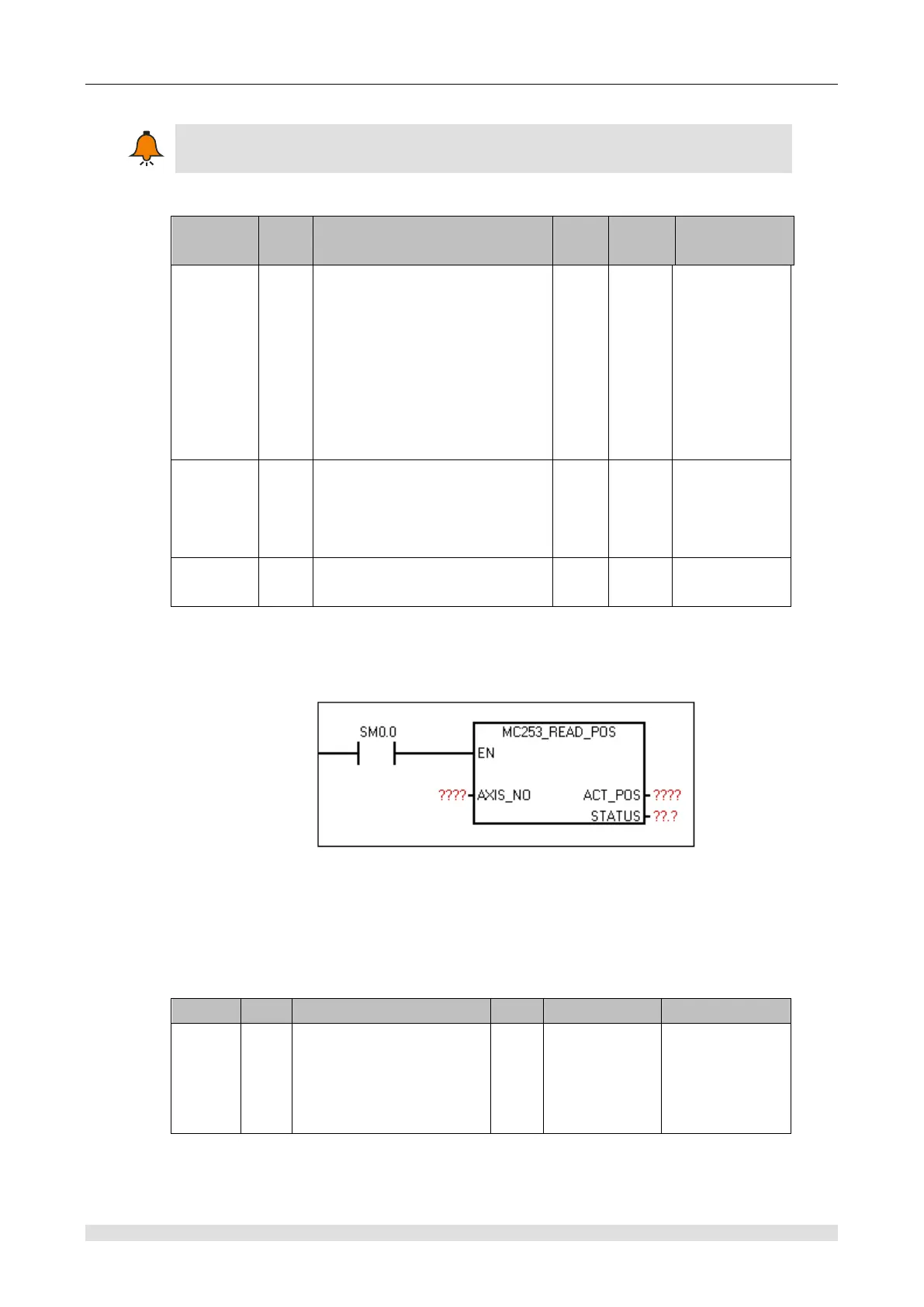
Read position instruction
① Function name: MC253_READ_POS
② Function: Read the absolute coordinate value of each axis. Once the origin coordinate is set,
the value will calculate according to relationship between the output pulse and direction:
positive rotation output a pulse: +1, while reverse output a pulse: -1. What you end up with is
an absolute coordinate with the set point as the origin.
③ Parameter
Set axis number(2 axes
for each EM253 module,
axis number range
decided by motion control
modules number)