Operation & Software Manual
102
Direct Drives & Systems
Chapter C: System functions ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
12.7.1.1 Phasing use
The motor must be initialized before powering it if an incremental encoder is used. This is the case in most
controllers applications.
On the other hand we do not need a phasing if we use a single-phase motor or when we use an EnDat 2.1
encoder. In all these cases K90 = 0.
12.7.1.2 Phasing purpose
The Back-EMF is induced in the motor by the magnets' magnetic field. For an optimum working of the motor,
the current into the coils has to be in phase with the B-EMF.
The phasing procedure determines the position of the motor's coils against the magnets poles with the aim of
injecting the good current shape into the coils (it will give the maximum force to the motor). In fact, it avoids to
calculate the initial position of the pointer in the look-up table of the phases commutation.
The look-up table of the phases commutation is a continuity of points making a sine, used to inject the currents
into the coils in function of the position of the magnets.
The phasing is done at each first ’Power On’ of the motor or after each INI command.
After a phasing, the position of the motor against the magnets is precise enough to allow displacements.
However, if the phasing is not correctly done, it is possible that the motor cannot give the maximum force.
Sometimes the motor gives no force at all or worse, it gives a maximum force but in the wrong direction. In
those cases, we will talk about phase shift adjustment and, in the last case, about an inverted phase shift
adjustment. Next paragraph will show you the phase shift adjustment more precisely.
To resolve this problem, we have to do a fine phase shift adjustment (refer to §12.7.1.3
and §12.9 for more
information).
Remark: With the INI (phasing previously called INItialization) command, it is possible to restart a
phasing cycle at anytime but the controller must be in ’Power Off’ mode first. After the INI
command, the controller is in the same configuration than after the first ’Power On’. If K52=1 after
the INI command, the fine phase adjustment (parameter K53) does not work because the IND
command must be sent after the first ’Power On’ or the INI command.
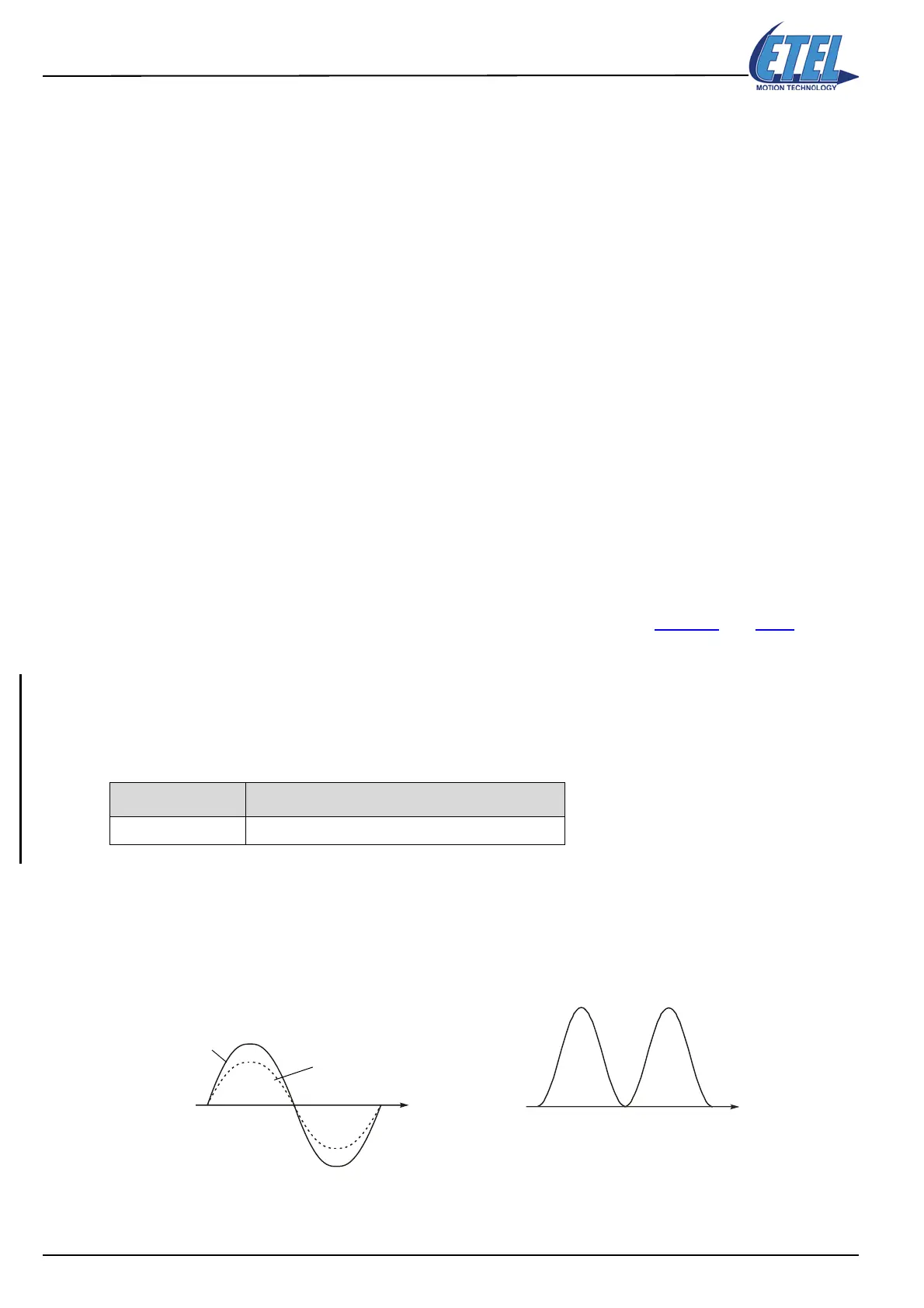
12.7.1.3 Phase shift adjustment
In order to obtain the maximum force from the motor, the current injected in the coils (phases) by the controller
must be in phase with the motor induced voltage (B-EMF): ideally, this phase shift should be null. This offset
correction is called phase shift adjustment, sometimes abridged PSA in this document.
Command format Comment
INI.<axis> Starts the phasing procedure
B-EMF in phase A
Force produced by phase A
current in phase A
t
t
Good phase shift adjustment

 Loading...
Loading...
