ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05 Chapter E: Appendixes
Operation & Software Manual
Direct Drives & Systems 297
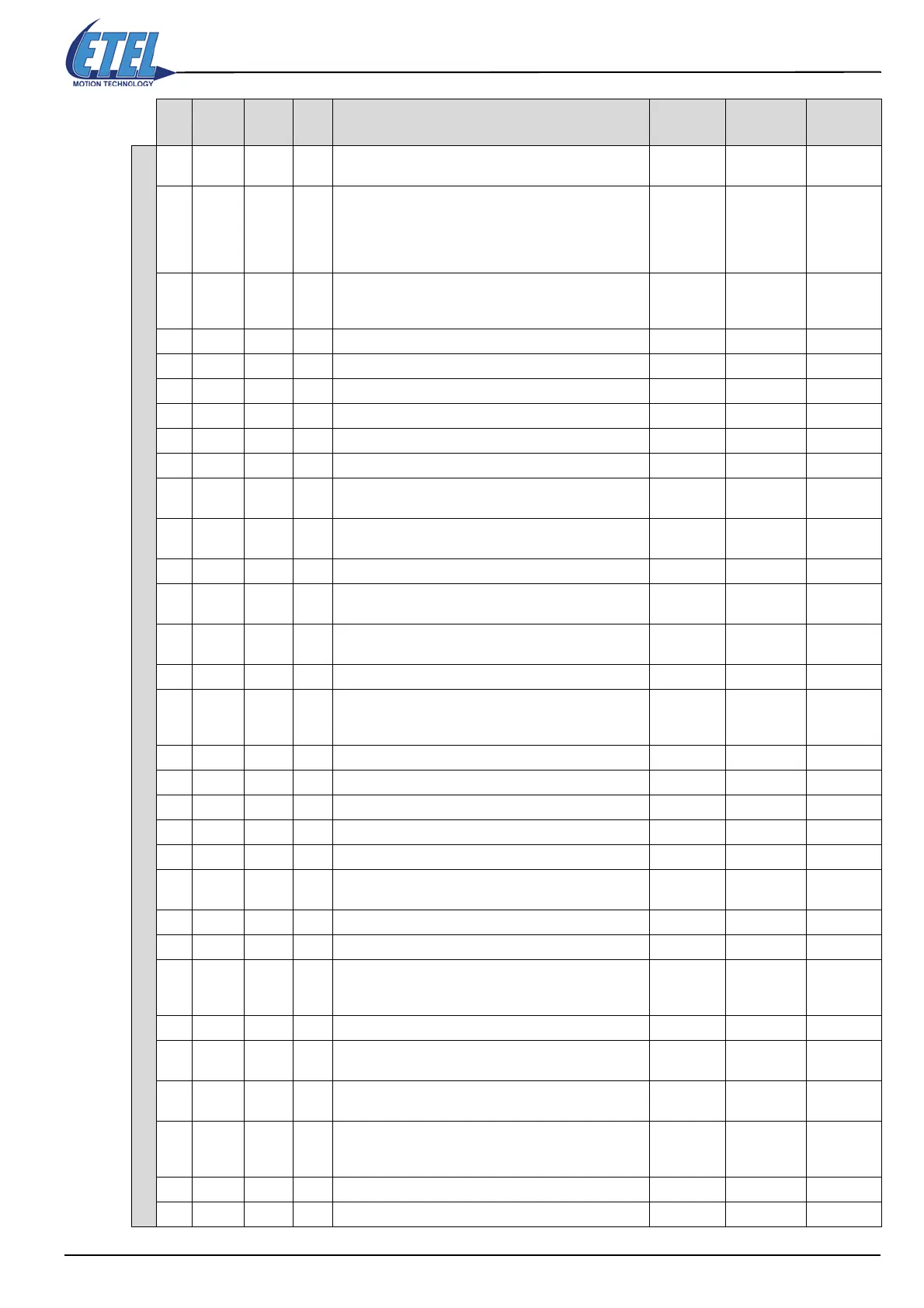
DSCDL parameters
34
Homing on a single index with detection of limit switch
coming from the encoder
36
Homing on home switch. If the motor reaches a
mechanical end stop before home switch, it changes its
movement direction. If after the mechanical end stop it
does not meet home switch before stroke defined by
K46, the controller generates an error (M64=62)
38
Homing on single index after having found mechanical
end stop with defined stroke (K46). If no index has been
met, the controller generates an error (M64=62)
K41 Homing speed 2000000 1 2147483647
K42 Homing acceleration 1000000 256 2147483647
K43 Homing tracking limit for mechanical end stop detection 10000000 0 2147483647
K44 Homing force limit for mechanical end stop detection 4096 0 32767
K45 Offset on absolute position 0 -2147483648 2147483647
K46 Stroke for K40 = 20, 21, 24, 25 homing mode 0 0 2147483647
K47
Movement to go out of a limit switch or mechanical end
stop at the end of the homing
0 0 2147483647
K48
Movement to go out of an index or home switch if the
motor is on the top of it when starting the homing
0 0 2147483647
K50 Set point calculator shift value: 1dpi = 2^K50 * 1upi 0 0 8
K52
Enables fine phase adjustment (takes K53 into account)
after homing
001
K53
Motor commutation phase adjustment after homing (is
taken into account only if K52=1)
0 0 2048
K54 Pairs of pole of the motor (=1 for linear motor) 1 1 2147483647
K55
Motor commutation encoder: number of dpi per
revolution for rotary motor or number of dpi per magnetic
period for linear motor
0 0 2147483647
K56 Motor commutation phase inversion enabled 0 0 1
K58 Limit switch mode 0 0 2
0 Limit switch mode DIN9 and DIN10
1 Limit switch mode L1/L2
2 Limit switch mode L/H
K59
Theoretical software force/torque limit for stepper, when
no movement is required
20000 0 31000
K60 Theoretical software force/torque limit (regulator output) 20000 0 31000
K61 Reference mode 1 0 39
0
Force/torque reference mode. The reference value is
defined by K220 to K224 (32767 is equivalent to the
current defined by M82)
1 Standard position profile mode
3
Controller controlled by a speed reference defined by
K220 to K224
4
Controller controlled by a position reference defined by
K220 to K224
36
Controller controlled by a position reference defined by
K220 to K224. After a power on, it takes into account the
actual motor position as reference
K66 Display mode 1 1 64
1 Displays normal informations
K Alias
Val
<P1>
Bit #
<P1>
Comment for parameters K
and <P1> of the DSCDL
Def. Val
<P1>
Min. Val
<P1>
Max. Val
<P1>

 Loading...
Loading...
