Operation & Software Manual
304
Direct Drives & Systems
Chapter E: Appendixes ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
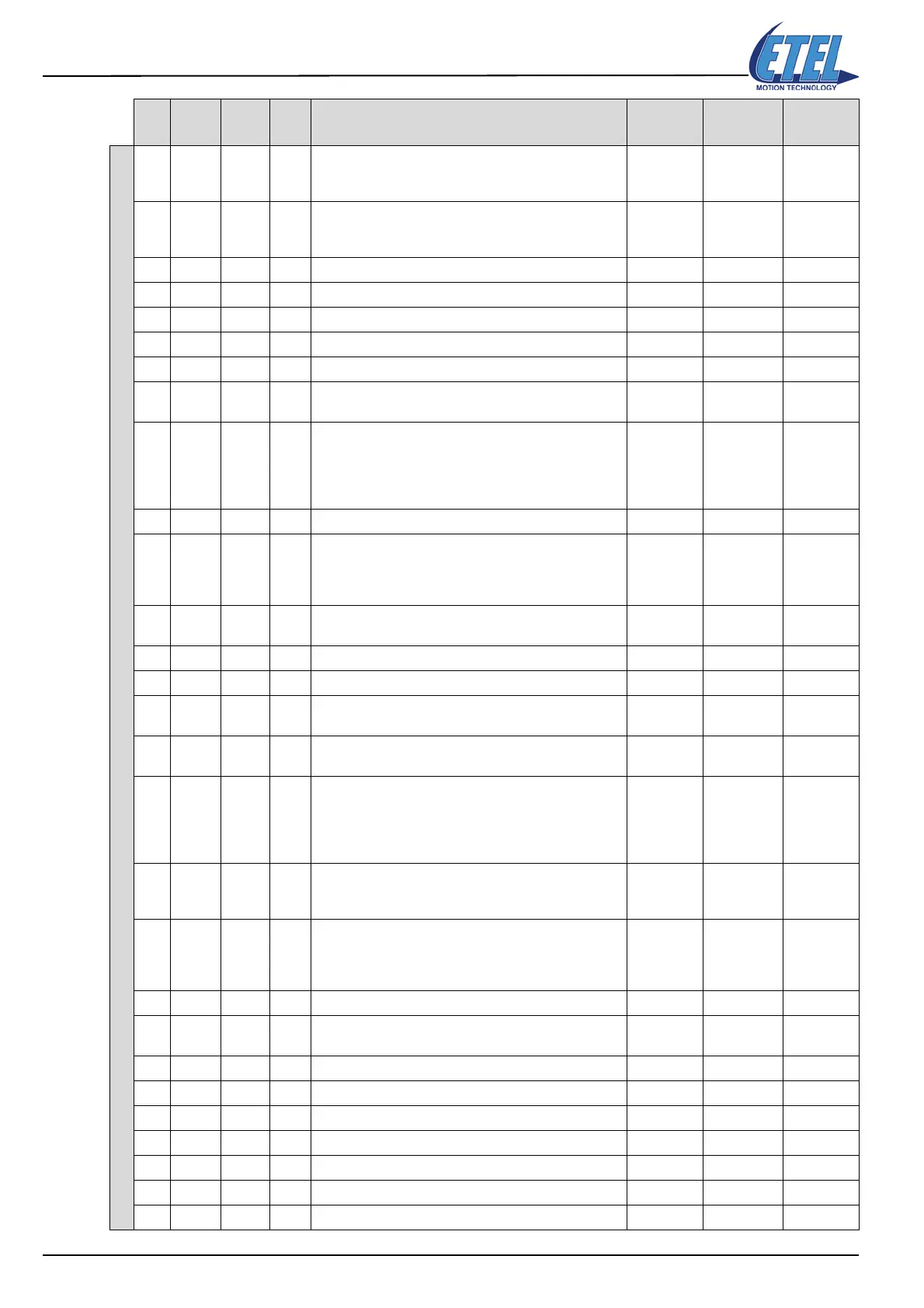
DSCDM parameters
K30
Absolute tracking error limit. When the tracking error is
greater than K30, the controller generates the error
M64=23
10000000 0 1073741823
K31
Absolute velocity limit. When the velocity is greater than
K31, the controller generates an overspeed error
M64=24
100000000 0 2147483647
K32 Limit switch and home switch inversion 0 0 63
1 0 Enables the use of the limit switches
2 1 Inverts home switch
4 2 Inverts limit switches from the encoder
8 3 Inverts limit switches
16 4
Enables the use of the dynamic braking controlled by the
transistors
32 5
Enables limitation of K60/K31 according to DIN. K178:2
defines the mask of the DIN that should be at 1 to limit
K60 and K31. K179:2 defines the mask of the DIN that
should be at 0 to limit K60 and K31. K60:3 and K31:3 are
the limitation
K33 Enables input mode 125 0 125
0
Enabled signal is necessary to power on the controller
on DIN1. In this case this input must be at 1 when a
PWR.#=1 command is executed. If this input is cleared,
the controller generates an error (M64=26)
125
Enabled signal not used (DIN1 is not taken into account).
PWR.#=1 command switches the power on the motor
K34 Minimum software position limit 0 -2147483648 2147483647
K35 Maximum software position limit 0 -2147483648 2147483647
K36
Enables position limit (K34, K35) generating an error
depending on the value
007
10
Use of K34 and K35 as limit on the target the motor can
reach. Used with K61=1
21
Use of K34 and K35 as limit on the actual position of the
motor. If the motor reaches these limits, it generates an
error (M64=65). These limits are tested on every sti but
only if a homing has been previously done. Used for all
values of K61
42
Use of K34 and K35 as limit on the target to generate an
error (M64=66) when the movement starts. Used with
K61=1
K37
Mask of the digital output (DOUT) that must be cleared
when the controller is in error. When the controller is not
in error any more, the digital outputs have the DOUT
value.
007
K38 Duration of the window (used with WTW command) 0 0 393210
K39
Position range of the window (used with WTW
command)
0 0 1073741823
K40 Homing mode 8 0 41
0 Homing on mechanical end stop
1 0 Homing with a negative movement
2 Homing on home switch
4 Homing on limit switch
6 Homing on home switch with detection of limit switch
8 Homing on a single index
K Alias
Val
<P1>
Bit #
<P1>
Comment for parameters K
and <P1> of the DSCDM
Def. Val
<P1>
Min. Val
<P1>
Max. Val
<P1>

 Loading...
Loading...
