Operation & Software Manual
306
Direct Drives & Systems
Chapter E: Appendixes ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
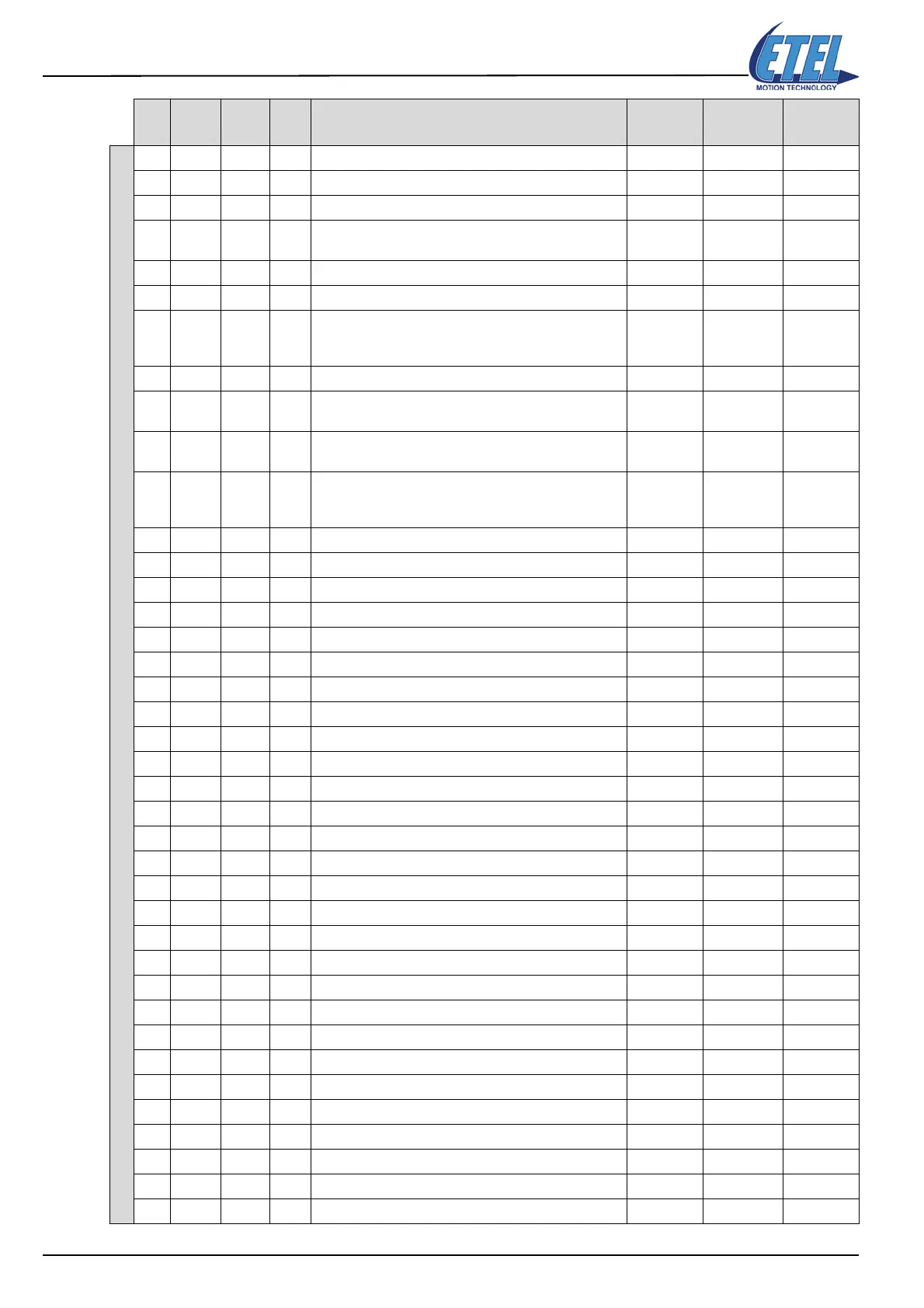
DSCDM parameters
2 Limit switch mode L/H
4 2 Home switch on DIN1
8 3 Home switch on DIN9
K59
Theoretical software force/torque limit for stepper, when
no movement is required
20000 0 31000
K60 Theoretical software force/torque limit (regulator output) 20000 0 31000
K61 Reference mode 1 0 39
0
Force/torque reference mode. The reference value is
defined by K220 to K224 (32767 is equivalent to the
current defined by M82)
1 Standard position profile mode
3
Controller controlled by a speed reference defined by
K220 to K224
4
Controller controlled by a position reference defined by
K220 to K224
36
Controller controlled by a position reference defined by
K220 to K224. After a power on, it takes into account the
actual motor position as reference
K66 Display mode 1 1 64
1 Displays normal informations
2 Displays temperature of the controller
4 Displays analog encoder amplitude and index position
8 Displays sequence line number
K68 Inverts positive/negative way 0 0 7
1 0 Inverts analog 1Vptp encoder
2 1 Inverts TTL encoder
K69 Encoder shift value for TTL encoder (K79=1) 0 0 12
K70 Analog encoder sine offset 0 -1024 1024
K71 Analog encoder cosine offset 0 -1024 1024
K72 Analog encoder sine factor 32767 16384 32767
K73 Analog encoder cosine factor 32767 16384 32767
K75 Distance between two indexes for multi-indexes encoder 0 0 2147483647
K77 Encoder interpolation shift value for analog encoder 0 0 12
K79 Encoder type selection 0 0 120
0 Analog sine/cosine encoder 1Vptp
1 TTL encoder
4 EnDat encoder
20 Stepper in open loop without encoder
21 Stepper in open loop with TTL encoder as secondary
23 Stepper in open loop with 1Vptp encoder as secondary
24 Stepper in open loop with EnDat encoder as secondary
K80 Current loop proportional gain 500 0 2147483647
K81 Current loop integrator gain 0 0 2147483647
K82 Current loop output filter 0 0 511
K83 Current loop software overcurrent limit 16000 0 32000
K84 Current loop i2t rms current limit 510 0 8192
K Alias
Val
<P1>
Bit #
<P1>
Comment for parameters K
and <P1> of the DSCDM
Def. Val
<P1>
Min. Val
<P1>
Max. Val
<P1>

 Loading...
Loading...
